Non-Transitive Connectivity and DHTs
Michael J. Freedman, Karthik Lakshminarayanan, Sean Rhea, and Ion Stoica
New York University and University of California, Berkeley
mfreed@cs.nyu.edu,
{karthik,srhea,istoica}@cs.berkeley.edu
1 Introduction
The most basic functionality of a distributed hash table, or DHT, is to
partition a key space across the set of nodes in a distributed system
such that all nodes agree on the partitioning. For example, the Chord
DHT assigns each node a random identifier from the key space of integers
modulo 2160 and maps each key to the node whose identifier most
immediately follows it. Chord is thus said to implement the
successor relation, and so long as each node in the network knows
its predecessor in the key space, any node can compute
which keys are mapped onto it.
An implicit assumption in Chord and other DHT protocols is that all
nodes are able to communicate with each other, yet we know this
assumption is unfounded in practice. We say a set of three hosts,
A, B, and C, exhibit non-transitivity if A can
communicate with B, and B can communicate with C, but A cannot
communicate with C. As we show in Section 2,
2.3% of all pairs of nodes on PlanetLab exhibit transient periods in
which they cannot communicate with each other, but in which they can
communicate through a third node. These transient periods of
non-transitivity occur for many reasons, including link failures, BGP
routing updates, and ISP peering disputes (e.g., [13]).
Such non-transitivity in the underlying network is problematic for
DHTs. Consider for example the Chord network illustrated in
Figure 1. Identifiers increase from the left, so node
B is the proper successor to key k. If nodes A and B are
unable to communicate with each other, A will believe that C is
its successor. Upon receiving a lookup request for k, A will
return C to the requester. If the requester then tries to
insert a document associated with k at node C, node C would
refuse, since according to its view it is not responsible for key k.
While this example may seem contrived, it is in fact quite common. If
each pair of nodes with adjacent identifiers in a 300-node Chord network
(independently) has a 0.1% chance of being unable to communicate, then
we expect that there is a 1-0.999300 » 26% chance that
some pair will be unable to communicate at any time. However,
both nodes in such a pair have a 0.9992 chance of being able to
communicate with the node that most immediately precedes them both.
Collectively, the authors have produced three independent DHT
implementations: the Bamboo [18] implementation in
OpenDHT [19], the Chord [23] implementation in
i3 [22], and the Kademlia [11] implementation in
Coral [8]. Moreover, we have run public deployments of these
three DHTs on PlanetLab for over a year.
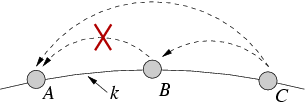 Figure 1:
Non-transitivity in Chord.
The dashed lines represent predecessor links.
Figure 1:
Non-transitivity in Chord.
The dashed lines represent predecessor links.
While DHT algorithms seem quite elegant on paper, in practice we found
that a great deal of our implementation effort was spent discovering and
fixing problems caused by non-transitivity. Of course,
maintaining a full link-state routing table at each DHT node would have
sufficed to solve all such problems, but would also require considerably
more bandwidth than a basic DHT.1 Instead, we each independently
discovered a set of "hacks" to cover up the false assumption of full
connectivity on which DHTs are based.
In this paper, we categorize the ways in which Bamboo, Chord, and
Kademlia break down under non-transitivity, and we enumerate
the ways we modified them to cope with these shortcomings. We also
discuss application-level solutions to the problem. Many of these
failure modes and fixes were quite painful for us to discover, and we
hope that-at least in the short term-this work will save others the
effort. In the longer term, we hope that by focusing attention on the
problem, we will encourage future DHT designers to tackle
non-transitivity head-on.
The next section quantifies the prevalence of non-transitivity on the
Internet and surveys related work in this area.
Section 3 presents a brief review of DHT terminology.
Section 4 discusses four problems caused by
non-transitivity in DHTs and our solutions to them. Finally,
Section 5 concludes.
2 Prevalence of Non-Transitivity
The Internet is known to suffer from
network outages (such as extremely heavy congestion or routing
convergence problems) that result in the loss of connectivity
between some pairs of nodes [14,3]. Furthermore, the
loss of connectivity is often non-transitive; in fact, RON [3]
and SOSR [10] take advantage of such non-transitivity-the
fact that two nodes that cannot temporarily communicate with one
another often have a third node that can communicate with them
both-to improve resilience by routing around network outages.
Gerding and Stribling [9] observed a significant
degree of non-transitivity among PlanetLab hosts; of all possible
unordered three tuples of nodes (A,B,C), about 9% exhibited
non-transitivity. Furthermore, they attributed this non-transitivity
to the fact that PlanetLab consists of three classes of nodes:
Internet1-only, Internet2-only, and multi-homed nodes. Although
Internet1-only and Internet2-only nodes cannot directly communicate,
multi-homed nodes can communicate with them both.
Extending the above study, we have found that transient routing problems
are also a major source of non-transitivity in PlanetLab. In
particular, we considered a three hour window on August 3, 2005 from
the all-pairs ping dataset [1]. The dataset consists of pings
between all pairs of nodes conducted every 15 minutes, with each data
point averaged over ten ping attempts.
We counted the number of unordered pairs of hosts (A,B) such that
A and B cannot reach each other but another host C can reach
both A and B. We found that, of all pairs of nodes, about 5.2%
of them belonged to this category over the three hour window. Of
these pairs of nodes, about 56% of the pairs had persistent
problems; these were probably because of the problem described above.
However, the remaining 44% of the pairs exhibited problems
intermittently; in fact, about 25% of the pairs could not
communicate with each other only in one of the 15-minute snapshots.
This suggests that non-transitivity is not entirely an artifact
of the PlanetLab testbed, but also caused by transient routing
problems.
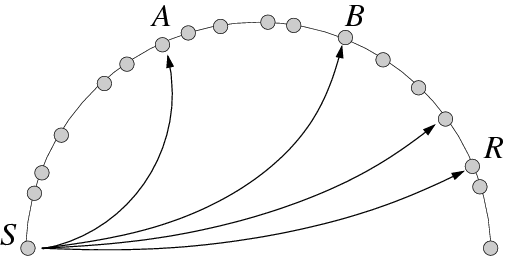 Figure 2: Two styles of DHT routing for source node S to
perform a lookup that terminates at root node R.
Figure 2: Two styles of DHT routing for source node S to
perform a lookup that terminates at root node R.
3 DHT Background
Before moving on to the core of this paper, we first briefly
review basic DHT nomenclature. We assume the
reader has some familiarity with basic DHT routing protocols. For
more information, see [23,11,21].
The DHT assigns every key in the identifier space to a node, which is
called the root (or the successor) of the key. The main
primitive that DHTs support is lookup, in which a node can
efficiently discover a key's root. The lookup protocol greedily
traverses the nodes of the DHT, progressing closer to the root of the
key at each step.
Each node maintains a set of neighbors that it uses to route packets.
Typically, such neighbors are divided into (a) short links
chosen from the node's immediate neighborhood in the ID space to
ensure correctness of lookups, and (b) long links chosen to
ensure that lookups are efficient (e.g., take no more than O(logn)
hops for a network with n nodes). In Chord and Bamboo, the set of
short links is called the node's successor list and leaf
set, respectively, and the long links are called fingers and
routing table entries. While Kademlia uses a single routing
table, one can still differentiate between its closest bucket of
short links and farther buckets of long links.
DHT routing can be either iterative or
recursive [7] (see Figure 2). Consider
a simple example, in which source node S initiates a lookup for some key
whose root is node R. In iterative routing, node S first contacts
node A to learn about node B, and then S subsequently contacts
B. In recursive routing, S contacts A, and A contacts B in
turn.
Both routing techniques have different strengths. For example,
recursive routing is faster than iterative routing using the same
bandwidth budget [7,17] and can use faster
per-node timeouts [18]. On the other hand, iterative
routing gives the initiating node more end-to-end control,
which can be used, for instance, for better
parallelization [11,17]. We discuss the impact
of both approaches in the following section.
4 Problems and Solutions
This section presents problems caused by non-transitivity in DHTs
and the methods we use to mitigate them. We present these problems in
increasing order of how difficult they are to solve.
4.1 Invisible Nodes
One problem due to non-transitivity occurs when a node learns about
system participants from other nodes, yet cannot directly communicate
with these newly discovered nodes. This problem arises both during
neighbor maintenance and while performing lookups.
For example, assume that a node A learns about a potential neighbor
B through a third node C, but A and B cannot directly
communicate. We say that from A's perspective B is an
invisible node. In early versions of both Bamboo and
i3-Chord, A would blindly add B as a neighbor. Later, A would
notice that B was unreachable and remove it, but in the meantime A
would try to route messages through B.
A related problem occurs when nodes blindly trust failure notifications
from other nodes. Continuing the above example, when A fails to
contact B due to non-transitivity, in a naive implementation A will
inform C of this fact, and C will erroneously remove B as a
neighbor.
A simple fix for both of these problems is to prevent nodes from
blindly trusting other nodes with respect to which nodes in the network
are up or down. Instead, a node A should only add a neighbor B
after successfully communicating with it, and A should only remove a
neighbor with whom it can no longer directly communicate. This
technique is used by all three of our DHTs.
 Figure 3:
Invisible nodes.
S learns about M and N from A while trying to route to R, but
S has no direct connectivity to M. By sending lookup messages to
M and N in parallel, S avoids being stalled while its request to
M times out.
Figure 3:
Invisible nodes.
S learns about M and N from A while trying to route to R, but
S has no direct connectivity to M. By sending lookup messages to
M and N in parallel, S avoids being stalled while its request to
M times out.
Invisible nodes also cause performance problems during iterative
routing, where the node performing a lookup must communicate with nodes
that are not its immediate neighbors in the overlay. For example, as
shown in Figure 3, a node S may learn of another node M
through its neighbor A, but may be unable to directly communicate with M
to perform a lookup. S will eventually time out its request to M,
but such timeouts increase the latency of lookups substantially.
Three techniques can mitigate the effect of invisible nodes on lookup
performance in iterative routing. First, a DHT can use virtual
coordinates such as those computed by Vivaldi [6] to choose
tighter timeouts. This technique should work well in general, although
we have found that the Vivaldi implementations in both Bamboo and Coral
are too inaccurate on PlanetLab to be of much use.2
Second, a node can send several messages in parallel for each lookup,
allowing requests to continue towards the root even when some others
time out. As shown in Figure 3, S can send lookup
messages to M and N in parallel. This technique was first
proposed in Kademlia [11].
Third, a node can remember other nodes that it was unable to reach in
the past. Using this technique, which we call a unreachable node
cache, a node S marks M as unreachable after a few failed
communication attempts. Then, if M is encountered again during a
subsequent lookup request, S immediately concludes that it is
unreachable without wasting bandwidth and suffering a timeout.
OpenDHT and i3 both use recursive routing, but Coral implements
iterative routing using the above approach, maintaining three parallel
RPCs and a unreachable node cache.
4.2 Routing Loops
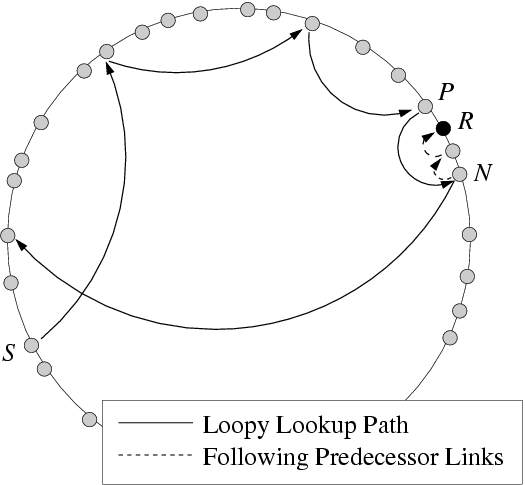 Figure 4:
Routing loops.
In Chord, if a lookup passes by the correct successor on account of
non-transitivity, a routing loop arises. The correctness of lookup can
be improved in such cases by traversing predecessor links.
Figure 4:
Routing loops.
In Chord, if a lookup passes by the correct successor on account of
non-transitivity, a routing loop arises. The correctness of lookup can
be improved in such cases by traversing predecessor links.
In Chord, non-transitivity causes routing loops as follows. The root
for a key k in Chord is the node whose identifier most immediately
succeeds k in the circular key space. In
Figure 4, let the proper root for k be R.
Also, assume that P cannot communicate with R. A lookup routed
through P thus skips over R to N, the next node in the key space
with which P can communicate. N, however, knows its correct
predecessor in the network, and therefore knows that it is not the
root for k. It thus forwards the lookup around the ring, and a loop
is formed.
Bamboo and Kademlia avoid routing loops by defining a total ordering
over nodes during routing. In these networks, a node A only forwards
a lookup on key k to another node B if |B-k| < |A-k|, where "-"
represents modular subtraction in Bamboo and XOR in Kademlia.
Introducing such a total ordering in Chord is straightforward: instead
of blindly forwarding a lookup towards the root, a node can stop any
lookup that has already passed its root. For example, when N
receives a lookup for k from P, it knows something is amiss since
P < k < N, but N is not the direct successor of k.
Stopping a lookup in this way avoids loops, but it is often possible to
get closer to the root for a key by routing along predecessor links once
normal routing has stopped. i3's Chord implementation backtracks in
this way. For example, the dashed lines from N back to R in
Figure 4 show the path of the lookup using
predecessor links. To guarantee termination when backtracking, once a
packet begins following predecessor links it is never again routed along
forward links.
4.3 Broken Return Paths
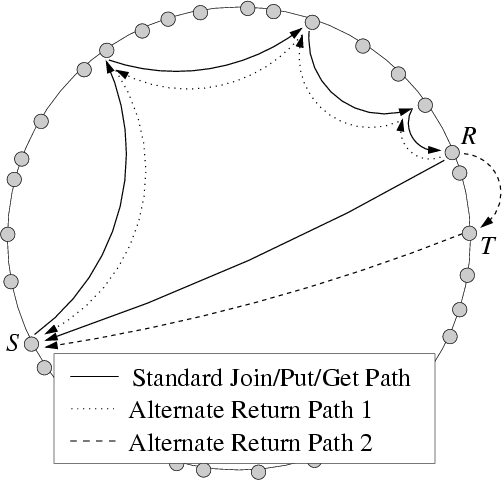 Figure 5:
Broken return paths.
Although S can route a put or get request to R through the overlay,
there may be no direct IP route back from R to S. One alternative
is to route the result back along the path taken from S to R; the
other is to route through a random neighbor T.
Figure 5:
Broken return paths.
Although S can route a put or get request to R through the overlay,
there may be no direct IP route back from R to S. One alternative
is to route the result back along the path taken from S to R; the
other is to route through a random neighbor T.
Often an application built atop a DHT routing layer wants to not only
route to the root of a key but also to retrieve some value back. For
example, it may route a put request to the root, in which case it
expects an acknowledgment of its request in return. Likewise, with a
get request, it expects to receive any values stored under the given
key. In one very important case, it routes a request to join the DHT to
the root and expects to receive the root's leaf set or successor list in
return.
As shown in Figure 5, when a source S routes a
request recursively to the root R, the most obvious and least costly
way for R to respond is to communicate with S directly over
IP. While this approach works well in the common case, it fails with
non-transitivity; the existence of a route from S to R through the
overlay does not guarantee the existence of the direct IP route back.
We know of two solutions to this problem.
The first solution is to source route the message backwards along the
path it traveled from S to R in the first place, as shown by the
dotted line in Figure 5. Since each node along
the path forwarded the message through a neighbor that had been
responding to its probes for liveness, it is likely that this return
path is indeed routable. A downside of this solution is that the
message takes several hops to return to the client, wasting the
bandwidth of multiple nodes.3
A less costly solution is to have R source route its response to S
through a random member of its leaf set or successor list, as shown by
the dashed line in Figure 5. These nodes are
chosen randomly with respect to R itself (by the random assignment of
node identifiers), so
most of them are likely to be able to route to S. Moreover, we already
know that R can route to them, or it would not have them as
neighbors.
A problem with both of these solutions is that they waste bandwidth in
the common case where R can indeed send its response directly to
S. To avoid this waste, we have S acknowledge the direct response
from R. If R fails to receive an acknowledgment after some
timeout, R source routes the response back (either along the request
path or through a single neighbor). This timeout can be chosen using
virtual coordinates, although we have had difficulty with
Vivaldi on PlanetLab as discussed earlier. Alternatively, we can
simply choose a conservative timeout value: as it is used only in the
uncommon case where R cannot route directly to S, it affects the
latency of only a few requests in practice. Bamboo/OpenDHT
routes back through a random leaf-set neighbor in the case of
non-transitivity, using a timeout of five seconds.
We note that iterative routing does not directly suffer from this
problem. Since S directs the routing process itself, it will assume
R is down and look for an alternate root R' (i.e., the node that
would be the root if R were actually down). Of course, depending on
the application, R' may not be a suitable replacement for R,
but that reduces to the inconsistent root problem, which we discuss
next.
4.4 Inconsistent Roots
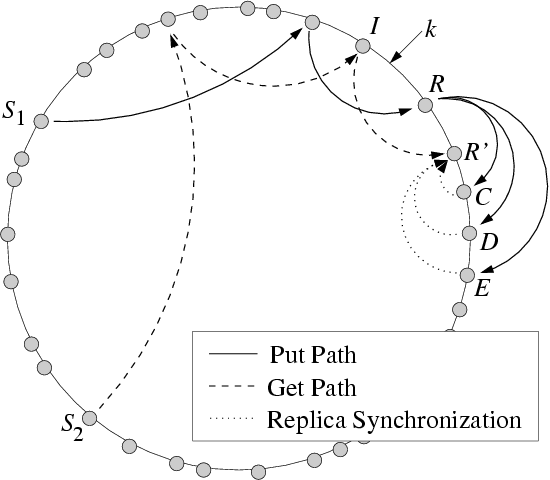 Figure 6:
Inconsistent roots.
A put from S1 is routed to the root, R, which should replicate it
on R',C,D. But since R cannot communicate with R', it replicates
it on C-E instead. R' will later acquire a replica during
synchronization with C-E.
Figure 6:
Inconsistent roots.
A put from S1 is routed to the root, R, which should replicate it
on R',C,D. But since R cannot communicate with R', it replicates
it on C-E instead. R' will later acquire a replica during
synchronization with C-E.
The problems we have discussed so far are all routing problems. In
this section, we discuss a problem caused by non-transitivity that
affects the correctness of the partitioning of the DHT key space.
Most DHT applications assume that there is only one root for a given key
in the DHT at any given time. As shown in Figure 6,
however, this assumption may be invalid in the presence of
non-transitivity. In the figure, node R is the proper root of key
k, but since R and R' cannot communicate, R' mistakenly believes
it is the root for k. A lookup from S1 finds the correct root, but
a lookup from S2 travels through node I, which also cannot
communicate with R, and terminates instead at R'.
Prior work has explored the issue of multiple roots due to transient
conditions created by nodes joining and leaving the overlay, but has not
explored the effects of misbehavior in the underlying
network [4].
Given a complete partition of the network, it is difficult to solve
this problem at all, and we are not aware of any existing solutions to
it. On the other hand, if the degree of non-transitivity is limited,
the problem can be eliminated by the use of a consensus algorithm.
The use of such algorithms in DHTs is an active area of
research [12,20].
Nonetheless, consensus is expensive in messages and bandwidth, so many
existing DHTs use a probabilistic approach to solving the problem
instead. For example, FreePastry 1.4.1 maintains full link-state
routing information for each leaf set, and a node is considered alive
if any other member of its leaf set can route to
it [2]. Once routability has been provided in
this manner, existing techniques (e.g., [4]) can be
used to provide consistency.
An alternative approach used by both DHash [5] and
OpenDHT [16] is to solve the inconsistent root
problem at the application layer. Consider the
traditional put/get interface to hash tables.
As shown in
Figure 6, DHash sends a put request from S1 for a key-value
pair (k,v) to the r closest successors of k, each of which
stores a replica of (k,v).4 In the figure, R cannot communicate with R', and
hence the wrong set of nodes store replicas.
To handle this case, as well as normal failures, the nodes in each
successor list periodically synchronize with each other to discover
values they should be storing (see [5,16] for
details). As shown in the figure, R' synchronizes with C-E and
learns about the value put by S1. A subsequent get request from
S2 which is routed to R' will thus find the value despite the
non-transitivity.
Of course, if R' fails to synchronize with C-E between the put
from S1 and the get from S2, it will mistakenly send an empty
response for the get. To avoid this case, for each get request on key
k, DHash and OpenDHT query multiple successors of k. For example,
in the figure, R' would send the get request to C-E, and all four
nodes would respond to S2, which would then compile a combined
response. This extra step increases correctness at the cost of
increased latency and load; OpenDHT uses heuristics to decide when
this extra step can be eliminated safely [17].
5 Conclusion
In this paper, we enumerated several ways in which naive DHT
implementations break down under non-transitivity, and we presented
our experiences in dealing with the problems when building and
deploying three independent DHT-based
systems-OpenDHT [19] that uses
Bamboo [18], i3 [22] that uses
Chord [23], and Coral [8] that uses
Kademlia [11]. While we believe that the ultimate
long-term answer to dealing with issues arising from non-transitivity
is perhaps a fresh DHT design, we hope that, at least in the short
term, this work will save others the effort of finding and fixing the
problems we encountered.
References
- [1]
-
PlanetLab All-Pairs Pings.
http://pdos.lcs.mit.edu/~strib/pl_app/.
- [2]
-
Freepastry release notes.
http://freepastry.rice.edu/FreePastry/README-1.4.1.html, May
2005.
- [3]
-
D. Andersen, H. Balakrishnan, F. Kaashoek, and R. Morris.
Resilient Overlay Networks.
In Proc. SOSP, 2001.
- [4]
-
M. Castro, M. Costa, and A. Rowstron.
Performance and dependability of structured peer-to-peer overlays.
Technical Report MSR-TR-2003-94, Dec. 2003.
- [5]
-
J. Cates.
Robust and efficient data management for a distributed hash table.
Master's thesis, Massachusetts Institute of Technology, May 2003.
- [6]
-
F. Dabek, R. Cox, F. Kaahoek, and R. Morris.
Vivaldi: A decentralized network coordinate system.
In Proc. SIGCOMM, 2004.
- [7]
-
F. Dabek, J. Li, E. Sit, J. Robertson, M. F. Kaashoek, and R. Morris.
Designing a DHT for low latency and high throughput.
In Proc. NSDI, 2004.
- [8]
-
M. J. Freedman, E. Freudenthal, and D. Mazières.
Democratizing content publication with Coral.
In Proc. NSDI, Mar. 2004.
- [9]
-
S. Gerding and J. Stribling.
Examining the tradeoffs of structured overlays in a dynamic
non-transitive network, 2003.
Class project: http://pdos.csail.mit.edu/~strib/docs/projects/networking_fall2003.pdf.
- [10]
-
K. P. Gummadi, H. V. Madhyastha, S. D. Gribble, H. M. Levy, and D. Wetherall.
Improving the reliability of internet paths with one-hop source
routing.
In Proc. OSDI, 2002.
- [11]
-
P. Maymounkov and D. Mazieres.
Kademlia: A peer-to-peer information system based on the XOR
metric.
In Proc. IPTPS, 2002.
- [12]
-
A. Muthitacharoen, S. Gilbert, and R. Morris.
Etna: A fault-tolerant algorithm for atomic mutable DHT data.
Technical Report MIT-LCS-TR-993, MIT-LCS, June 2005.
- [13]
-
D. Neel.
Cogent, Level 3 in standoff over Internet access.
TechWeb, Oct. 2005.
- [14]
-
V. Paxson.
Measurements and Analysis of End-to-End Internet Dynamics.
PhD thesis, U.C. Berkeley, 1997.
- [15]
-
P. Pietzuch, J. Ledlie, and M. Seltzer.
Supporting network coordinates on PlanetLab.
2005.
- [16]
-
S. Rhea.
OpenDHT: A public DHT service.
PhD thesis, U.C. Berkeley, Aug. 2005.
- [17]
-
S. Rhea, B.-G. Chun, J. Kubiatowicz, and S. Shenker.
Fixing the embarrassing slowness of OpenDHT on PlanetLab.
In Proc. WORLDS, Dec. 2005.
- [18]
-
S. Rhea, D. Geels, T. Roscoe, and J. Kubiatowicz.
Handling churn in a DHT.
In USENIX Annual Tech. Conf., June 2004.
- [19]
-
S. Rhea, B. Godfrey, B. Karp, J. Kubiatowicz, S. Ratnasamy, S. Shenker,
I. Stoica, and H. Yu.
OpenDHT: A public DHT service and its uses.
In Proc. SIGCOMM, Aug. 2005.
- [20]
-
R. Rodrigues and B. Liskov.
Rosebud: A scalable byzantine-fault-tolerant storage architecture.
Technical Report TR/932, MIT CSAIL, Dec. 2003.
- [21]
-
A. Rowstron and P. Druschel.
Pastry: Scalable, distributed object location and routing for
large-scale peer-to-peer systems.
In Proc. IFIP/ACM Middleware, Nov. 2001.
- [22]
-
I. Stoica, D. Adkins, S. Zhuang, S. Shenker, and S. Surana.
Internet Indirection Infrastructure.
In Proc. SIGCOMM, Aug. 2002.
- [23]
-
I. Stoica, R. Morris, D. Karger, M. F. Kaashoek, and H. Balakrishnan.
Chord: A scalable peer-to-peer lookup service for Internet
applications.
In Proc. SIGCOMM, Aug. 2001.
Footnotes:
1For some applications,
link-state routing may in fact be the right solution, but such systems
are outside the scope of our consideration.
2We note,
however, that neither of our Vivaldi implementations include the kinds of
filtering used by Pietzuch, Ledlie, and Seltzer to produce more accurate
coordinates on PlanetLab [15]; it is possible that
their implementation would produce more accurate timeout values.
3A similar approach, where R
uses the DHT's routing algorithm to route its response to S's
identifier, has a similar cost but a lower likelihood of success in
most cases, so we ignore it here.
4DHash actually stores erasure codes
rather than replicas, but the distinction is not relevant to
this discussion.