5th USENIX Conference on File and Storage Technologies - Paper
Pp. 107–121 of the Proceedings
Architectures for Controller Based CDP
Architectures for Controller Based CDP
Guy Laden, Paula Ta-Shma, Eitan Yaffe, Michael Factor, Shachar Fienblit
IBM Haifa Research Laboratories
{laden, paula, eitany, factor, shachar }@il.ibm.com
Abstract
Continuous Data Protection (CDP) is a recent storage technology
which enables reverting the state of the storage to previous points
in time. We propose four alternative architectures for supporting
CDP in a storage controller, and compare them analytically with
respect to both write performance and space usage overheads. We
describe exactly how factors such as the degree of protection
granularity (continuous or at fixed intervals) and the temporal
distance distribution of the given workload affect these overheads.
Our model allows predicting the CDP overheads for arbitrary
workloads and concluding the best architecture for a given scenario.
Our analysis is verified by running a prototype CDP enabled block
device on both synthetic and traced workloads and comparing the
outcome with our analysis. Our work is the first to consider how
performance is affected by varying the degree of protection
granularity, both analytically and empirically. In addition it is
the first to precisely quantify the natural connection between CDP
overheads and a workload's temporal locality. We show that one of
the architectures we considered is superior for workloads exhibiting
high temporal locality w.r.t. granularity, whereas another of the
architectures is superior for workloads exhibiting low temporal
locality w.r.t. granularity. We analyze two specific workloads, an
OLTP workload and a file server workload, and show which CDP
architecture is superior for each workload at which granularities.
1 Introduction
Continuous Data Protection (CDP) [13] is a new paradigm
in backup and recovery, where the history of writes to storage is
continuously captured, thereby allowing the storage state to be
potentially reverted to any previous point in time. Typically the
amount of history stored is limited by the operator, either in
temporal terms using a CDP window (e.g. 2 days) or in terms of
the amount of additional storage available for history data. CDP
can be provided by different entities in the I/O path such as the
host being protected (by the filesystem
[28,27,24] or the Logical Volume Manager
(LVM)), a SAN appliance [7], a SAN switch or the block
storage controller. We focus on CDP enabling a block storage
controller although parts of our work may be applicable elsewhere.
We focus on the block level since this is typically the lowest
common denominator of real world heterogeneous applications. We
focus on the controller setting because it allows a wider range of
architectures and has potential for performance and resource usage
benefits. For example reverts do not generate network I/O, and both
device I/O and space can potentially be reduced.
Advanced functions such as (writable) point-in-time copies and
remote replication have already been introduced to storage
controllers. The advent of these and other features has resulted in
a growing divergence between the notion of logical and physical
volumes. Moreover, log structured file systems [25] and log
structured arrays (a similar notion realized in a controller
setting) [22] have proposed exploiting this notion improve
file system/controller performance for write requests by turning
logically random write requests to physically sequential ones. CDP
is an additional technology that furthers this trend, by introducing
time as an additional dimension that can be virtualized. In this
paper we study some of the associated performance tradeoffs.
Enabling the controller to save the history of host writes typically
requires that the writes are duplicated and split. We present four
different architectures for controller-based CDP that are
differentiated by the point in time at which the writes are split:
on receipt of the write by the controller, on destage of the write
from the controller cache, on overwrite of a block by a newer
version or never (avoiding duplication/splitting).
There is an ongoing debate [1] as to whether
continuous protection (aka every write protection) provides
much benefit to customers compared to coarser protection
granularities. As a result some products going under the banner of
CDP provide continuous (aka every write) protection, while other
products are said to support near CDP, with protection
granularities ranging from minutes to hours. CDP at whatever
granularity does not come for free in either performance (impact on
I/O throughput and latency) or disk space. We provide an exact
analysis of the way the degree of protection (from granularity of
every write to arbitrarily large fixed intervals) affects
performance and space overheads.
When measuring performance, we focus on the count of additional
device I/O's incurred by write requests in regular (non revert)
scenarios for keeping track of prior versions and recording them in
the CDP history. We focus on write requests since this is the main
CDP overhead in good-path scenarios for 3 out of 4 of our
architectures, where read performance is equivalent to that of a
regular volume. Performance immediately after a revert depends on
the data structures chosen to represent the CDP history and is the
same across the architectures we compare since they share a common
infrastructure for storing CDP history. Note that for appliance
based block CDP, duplicating and splitting writes cannot be done at
destage or overwrite time. Therefore our comparison of architectures
also sheds light on inherent potential differences between appliance
and controller based CDP.
Apart from logging write traffic, a controller offering a high-end
CDP feature set must provide for fast revert of a production LUN to
a prior point in time, be able to quickly export writable historical
versions of the production volume, to perform automatic space
reclamation of the older historical data etc. Although our proposed
architectures all support these features, in this paper we do not
describe the details and focus on the overheads CDP incurs when
providing basic block I/O functionality.
We analyze our CDP architectures to accurately predict both the
count of additional I/O's incurred by write requests and the space
consumption overhead of each architecture. We describe exactly how
factors such as the degree of protection granularity (continuous or
at fixed intervals) and the temporal distance distribution of the
given workload affect these overheads. Our work precisely quantifies
the natural connection between CDP overheads and a workload's
temporal locality. It allows predicting the CDP overheads for
arbitrary workloads and concluding the best architecture for a given
scenario.
We implemented a prototype CDP enabled block device and use it to
validate our analysis against implementations of the architectures.
We compare the cost of the architectures on real-world filesystem
traces and synthetic OLTP traces, as we vary the protection
granularity, and we conclude the best CDP architectures for these
scenarios.
The outline of the paper is as follows. In section 2 we
describe architectures for implementing CDP in a storage controller
and in section 3 we characterize their performance
analytically. Section 4 presents an evaluation of the
performance of the proposed architectures on synthetic and real-life
traced workloads. Section 5 reviews related work, and
in section 6 we present our conclusions.
2 Architectures
2.1 Controller Background
Modern storage controllers typically contain a combination of
processor complexes, read and fast write cache, host and device
adapters, and physical storage devices. All components are typically
paired so that there is no single point of failure
[18,17,16]. Our figures describe a configuration
having two nodes, where each one has one processor complex,
one or more host adapters, one or more device adapters and one read
and fast write cache, and each node owns a set of volumes (logical
units (LUNs)) of the physical storage. To implement the fast write
cache a subset of the total cache memory is backed by non volatile
storage (NVS) on the opposite node. On node failure, volume
ownership is transferred to the opposite node.
Cache (whether backed by NVS or not) is typically divided into units
called pages, whereas disk is divided into units called
blocks - pages/blocks are the smallest units of memory/disk
allocation respectively. Stage and destage operations typically
operate on an extent, which is a set of consecutive blocks. In
the context of this paper, we concentrate on the case where the
extent size is fixed and is equal to the page size. All
architectures we discuss can be generalized to deal with the case
that the extent size is some multiple of the page size although this
requires delving into many details which need to be addressed for
all architectures, and this is orthogonal to the main ideas we want
to develop in the paper.
2.2 Integrating CDP into a Controller
We assume some mechanism for mapping between logical and physical
addresses
where there is not a simple a priori relationship between them. Thin
provisioning is another controller feature which can benefit from
such a mapping. Such a mechanism must allow the cache to
stage/destage from a physical address which differs from the logical
address of the request. One way to do this is to allow the cache to
invoke callbacks, so that a logical to physical map (LPMap)
can be accessed either before or after stage and destage operations.
In the case of CDP, timestamps will play a role in the LPMap.
We should distinguish between volumes that are directly
addressible, and those which are mapped since they require a
structure such as an LPMap in order to access them. Mapped volumes
may be stored in individual physical volumes or alternatively
several of them can be stored together in a larger physical volume
which serves as a storage pool. Mapped volumes may sometimes be
hidden from the user, as we will see for some of the architectures.
The LPMap structure supports the following API:
- insert
- insert a mapping from a particular logical address to physical address, to be labeled by the current timestamp
- lookup
- look up the current physical address corresponding to a particular logical address
- revert
- revert the LPMap structure to a previous point in time
All architectures we consider will use the same LPMap
representation.
2.3 Architectural Design Points
There are several factors which determine the CDP architecture. One
factor is whether the current version of a volume is stored together
with the historical data or separately from it. Storing current and
historical data together results in the logging architecture.
Note that this is not an option with host and network based CDP,
where writes are duplicated and split at the host or at the network.
Since good sequential read performance is likely to be essential for
most workloads, we consider alternative architectures containing 2
volumes - a directly addressible volume to hold the current version,
and a hidden, mapped volume to contain historical data. In order to
restore good sequential read performance, reverting such a volume to
a previous point in time now inherently requires significant I/O -
each changed extent needs to be physically copied from the history
store to the current store. This I/O activity can be done in the
background while the history store is used to respond to read
requests as needed. This is similar to a background copy feature
which accompanies some point-in-time copy implementations
[10], and we expect the duration of such a
background copy and the degree of performance degradation to be
similar.
Assuming this separation between current and historical data, an
important factor is when the duplication and splitting of I/O's is
done. Splitting at write time leads to the SplitStream
architecture, splitting at destage time leads to the
SplitDownStream architecture, and splitting before overwrite time
leads to the Checkpointing architecture. The corresponding
location of the splitting would be above the cache, below the cache
and at the storage respectively.
Note that our figures depict the current and history volumes as
owned by opposite nodes, even though this is not necessarily the
case. Moreover, in our figures we depict the CDP architectures as
implemented on the previously described controller hardware. The
figures might look slightly different if we were to design each
particular CDP architecture from scratch with its own dedicated
hardware.
A need may arise for multi-version cache support, namely the
cache may need the ability to hold many versions of the same page.
The CDP granularity requested by the user determines when data may
be overwritten, for example every write granularity means that all
versions must be retained and none overwritten. In this case, if the
cache cannot hold multiple versions of a page, then an incoming
write can force a destage of an existing modified cache entry. This
needs to be taken into account since it can have affect the latency
of write requests. How to best implement a multi-version cache is
outside the scope of this paper.
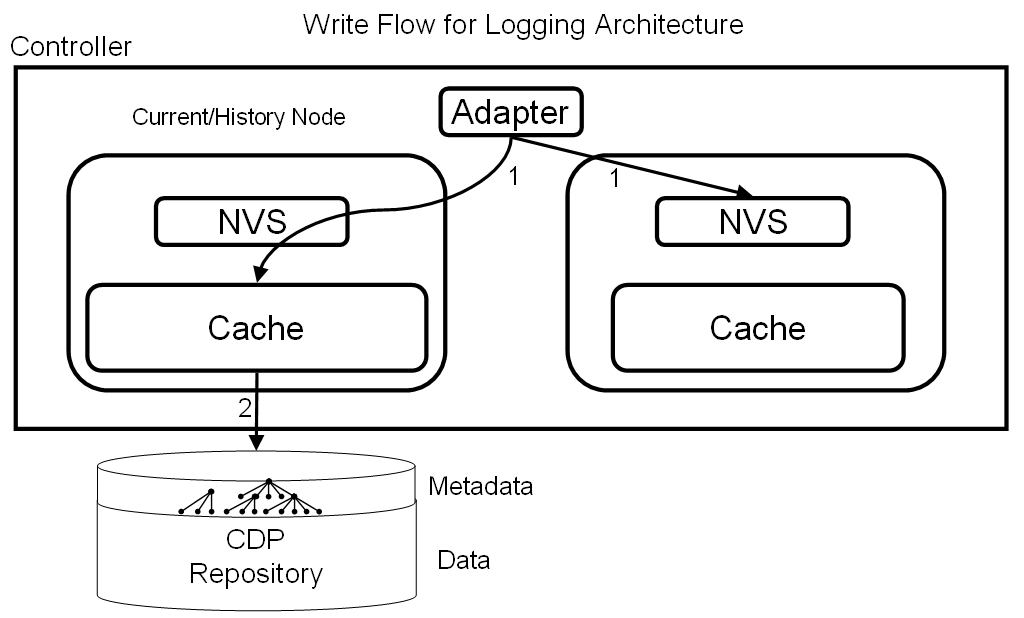
2.4 The Logging Architecture
The logging architecture is the simplest - the entire history of
writes to a volume is stored in a mapped volume which is not hidden
from the user.
Figure 1:
Logging Architecture Write Flow - each write
request incurs at most 1 user data device I/O.
Figure 1 depicts the write flow for the logging
architecture. Note that each write request incurs at most 1 user
data device I/O. If the CDP granularity is coarser than the rate of
writes to a particular logical address, then there is potential to
avoid this I/O if the logical address is cached.
Both stages and destages need to access the LPMap structure. This
approach is good for a write dominated workload, since not only do
we avoid additional device I/O as a result of duplicating or copying
from current volumes to historical volumes, we also have an
opportunity to covert random writes into sequential ones, as done in
[25]. An additional benefit is that with the right data
structures for representing CDP history, revert can be done with a
small constant overhead although the details are out of scope for
this paper. Note that both reads and writes may require accessing
the LPMap structures, although this does not always require
additional device I/O, if these structures are intelligently cached.
More importantly, the cost of accessing the LPMap is similar for all
the architectures we discuss.
The important downside of this architecture is that one is likely to
forfeit good sequential read performance, mainly because of the
difficulty of sequential layout of extents on disk, and also because
of access to the LPMap meta data. Although the layout is dependent
on the implementation of the LPMap, which is out of the scope of
this paper, guaranteeing good sequential read performance for this
type of architecture is a difficult research problem [25]. Our
simpler approach for achieving good sequential read performance is
to separate current and historical data. Sequential read performance
of historical data is not critical since it is only read immediately
after a revert.
An additional issue with the logging architecture is that it is not
straight forward to CDP enable an existing volume. Building the
entire LPMap structure up front is not feasible, although if we
choose to build it on demand, we may wait indefinitely until we can
recycle the space of the original volume.
Note that the logging architecture is appropriate for a logging
workload, since read access is only needed in error scenarios.
2.5 The SplitStream Architecture Duplicating and splitting
data above the cache leads to the SplitStream architecture.
One copy of the data is sent to a current store - a directly
addressable volume which holds the current version, and an
additional copy is sent to a history store - a hidden, mapped
volume, which in this case contains both current and previous
versions of the data.
Figure 2:
SplitStream Architecture Write Flow - Writes
are split above the cache, and each write request incurs up to 2
user data device I/O's.
Figure 2 depicts the write flow for the SplitStream
architecture. Note that each write request incurs at most 2 user data I/Os,
one to each of the current and history stores. Just as for regular volumes,
the cache can potentially save a current store I/O for those logical addresses
that are repeatedly written to while they are still cache resident, and this
effect is independent from the CDP granularity. If the CDP granularity is
coarser than the rate of writes to a particular logical address, then there is
potential to save a second I/O if that logical address is cached at the
history store. Compared to the logging architecture, we gain good sequential
read performance at the expense of incurring additional I/Os on write
requests, and using more resources such as disk space and cache memory.
Note that in this case the cache can manage each volume separately,
so a multi-versioned cache may not be a necessity. The current store
does not need to deal with historical data, so can be cached as a
regular volume, while the history store will not service reads, so
caching simply serves as a means to buffer write access. Note that
for coarse granularity the history store cache also serves to reduce
device I/O for those logical addresses that are written to
frequently. In the SplitStream architecture, the same data may
appear twice in cache which inflates memory requirements, although
the relative sizes of the current and history caches and the cache
replacement algorithm could be tailored to take this into account.
2.6 The SplitDownStream Architecture In the
SplitDownStream architecture, the duplicating and splitting of data
occurs under the cache, at destage time, instead of above the cache
as is the case for SplitStream. In other respects the architectures
are identical. This allows cache pages to be shared across current
and historical volumes, thereby conserving memory resources.
However, since the cache functions both to serve read requests and
to buffer access to the history store, a versioned cache is needed
to avoid latency issues.
Figure 3:
The SplitDownStream Architecture Write
Flow - writes are split below the cache and each write request
incurs up to 2 user data device I/O's.
Figure 3 depicts the write flow for the
SplitDownStream architecture. Note that if we ignore cache effects
which are different in the two architectures, SplitDownStream is
identical to SplitStream in the number of device I/O's incurred by a
write request.
2.7 The Checkpointing Architecture Similar to the
SplitStream and SplitDownStream architectures, the Checkpointing
architecture has a directly addressible current store and a hidden
mapped history store. However, in this case the current version
exists only at the current store, while the history store contains
only previous versions of the data. At destage time, before
overwriting an extent at the current store, we first check whether
it needs to be retained in the history store. This depends on the
CDP granularity - every write granularity mandates that all versions
need to be retained, whereas a coarse granularity requires very few
versions to be retained. If needed, the extent is copied to the
history store before being overwritten by the destage. Note that
copying an extent from the current store to the history store
requires 2 device I/O's - one to stage to the history store cache,
and another to destage to the history store. Thus in total we may
incur up to 3 device I/O's per write request. Figure
4 depicts the write flow for the Checkpointing
architecture. If we do not use NVS at the history store, all 3
device I/Os are synchronous to the destage operation, although not
to the write request itself, since we cannot destage until the
previous version of the extent is safely on disk at the history
store. Therefore to provide good latency a versioning cache is
essential.
Of the total 3 possible device I/O's per write request, 2 of these
(those for copying from the current to the history store) are not at
all influenced by caching, and are completely determined by the CDP
granularity. The other I/O (for destaging to the current store) can
be avoided by caching if the particular version can be discarded
according to the CDP granularity.
We point out that the checkpointing architecture is essentially an
extension of the popular copy on destage technique used to implement
Point In Time (PIT) copies [12] to the CDP context.
Figure 4:
The Checkpointing Architecture Write Flow -
the previous version is copied to the history store before being
overwritten. Each write request incurs up to 3 user data device
I/O's.
3 Analysis
In this section we analyze both the number of device I/O's incurred
by write requests and the space overheads of the various CDP
architectures, as a function of the CDP granularity.
3.1 Preliminaries
The time dimension can be divided into a set of fixed length
granularity windows of size g. The requirement is to retain the
last write in each granularity window. The smaller the value of g,
the finer the granularity. When g is arbitrarily small, this
results in every write CDP, whereas when g is arbitrarily large,
this results in a regular volume with no CDP protection.
We define a write to a particular logical address to be
retained if it is the last in its granularity window at that
address. Fine granularity gives a large proportion of retained
writes, while the opposite is true for coarse granularity. We use
r to denote the proportion retained writes (0 £ r £ 1).
For example, every write granularity gives r=1 and as we increase
g so that the granularity becomes coarser, r approaches
0.
With respect to a fixed granularity, increasing the temporal
distances between writes decreases the probability of a write to be
retained. For a trace of a given workload, the temporal
distance distribution of the workload is a function T, where for
a given temporal distance t, T(t) is the fraction of
writes with distance £ t to the subsequent write,
so 0 £ T(t) £ 1. There are a number of examples of the use
of temporal distance distribution graphs in the literature
[26,32].
We use c to take write caching into account, where c is the
proportion of writes which are evicted from cache before being
overwritten (0 £ c £ 1). c = 1 means no absorption of
writes by cache, whereas c = 0 means all writes can potentially be
absorbed. Note that 1 - c is the write cache hit rate.
Like the cache hit rate, c depends both on attributes of the write
cache namely its size and replacement algorithm, as well as on
attributes of the workload, namely its temporal locality and the
distribution of its writes across logical addresses. The
distribution of writes has a clear effect since repeated writes to a
single address require less cache space than spreading the same
number of writes across many addresses .
We define a write to be incurred if it is either retained, or
evicted from cache before being overwritten, or both. In the logging
architecture, the incurred writes are those which lead to a device
I/O. We use d to denote the proportion of incurred writes under
the logging architecture (0 £ d £ 1). It is important to
note that in general d ¹ r + c - rc since being evicted from
cache and being retained are not necessarily independent events.
3.2 Device I/O's Incurred by Write Requests
For a given r,c and d, figure 5 summarizes
the I/O's incurred for the various architectures per write request.
Note that both r and d are dependent on the granularity g. In
section 3.4 we show how to derive r, and in
section 3.5 we show how to derive d.
| | Logging | Checkpointing | SStream | SDownStream | Crossover | |
| retained | current store | | 1 | c | 1 | |
| I/O's | history store | | 2 | 1 | 1 | |
| sub total (r=1) | 1 | 3 | 1 + c | 2 | never | |
| evicted | current store | | c | c | c | |
| I/O's | history store | | 0 | c | c | |
| sub total (r=0) | c | c | 2c | 2c | c=0 | |
| total | no cache (c=1) | 1 | 2r+1 | 2 | 2 | r = 0.5 |
| I/O's | infinite cache (c=0) | r | 3r | r | 2r | r = 0 |
| arbitrary cache | d | d + 2r | d + c | 2d | c = 2r |
Figure 5:
A table of device I/O's incurred per write request in terms of r,
the proportion of retained writes and c, the proportion of writes which are destaged before being overwritten,
and d, the proportion of writes resulting in a device I/O under the logging architecure.
We show the analytical crossover point between Checkpointing and SplitStream Architectures.
For example, if we have a workload with flat temporal locality of
0.5 seconds, then a once per second granularity gives r=0.5. If we
assume no cache then the expected cost of checkpointing per write
request is rp + (1-r)p¢, where p is the cost for a retained
write and p¢ is the cost for a non retained write in the
checkpointing architecture. This equals 3r + (1-r) = 2r+1. However
for SplitStream and SplitDownStream the cost is always 2. The
turning point is at r=0.5, a larger value of r will give an
advantage to Split(Down)Stream, whereas a smaller value will by
advantageous to Checkpointing. r is determined by the relationship
between the temporal locality of a given workload and the CDP
granularity chosen by the user. Note that r is oblivious to the
distribution of the writes, since the same fraction of retained
writes can be as easily obtained with the same number of writes to a
single logical address as to 1000 addresses, only the relationship
of the temporal distance of the writes and the granularity chosen is
important.
Caching does have an effect, and it should be clear from figure
5 that Split(Down)Stream can take better
advantage of the cache than Checkpointing. Checkpointing can utilize
cache to save non retained I/O's at the current store, but
Split(Down)Stream can do the same and more. At an unrealistic
extreme of infinite cache, SplitStream reduces I/O's to r per
write request, the bare minimum (and equal to the Logging
architecture). Here the expected cost of checkpointing per write
request is 3r, since all retained writes reach the history store
via the current store. Note that SplitDownStream is slightly
different from SplitStream in its behavior on retained I/O's at the
current store. Since we destage cache entries to the current and
history stores together, all retained writes reach the current
store. In summary, increasing the size of the cache reduces c, and
the SplitStream architecture gains most benefit from this, closely
followed by the SplitDownStream architecture.
Unlike the case for regular volumes (r = 0), as r increases, the
benefit which can be obtained by increasing the cache size becomes
more limited. For example, for the extreme case of r=1 e.g. every
write granularity, the I/O cost for Checkpointing per write is 3
independent of the cache size, while for SplitDownStream it is 2.
There is no crossover in this case and SplitDownStream always
dominates. At the opposite extreme of a regular (non CDP enabled)
volume (r = 0), the cost of checkpointing is c, whereas for
Split(Down)Stream it is 2c, giving a crossover at c=0. This
means that Checkpointing dominates Split(Down)Stream for all values
c > 0 e.g. for an arbitrarily large cache. The reason is that
Split(Down)Stream always splits and duplicate all writes, so it
costs more than a regular volume when cache entries are destaged.
Checkpointing, however, behaves like a regular volume in this case.
In general the crossover between Checkpointing and SplitStream is
obtained at c = 2r, where if c > 2r then Checkpointing dominates. This means that the proportion
of writes evicted from cache before being overwritten needs to be at
least twice the proportion of retained writes in order for
Checkpointing to dominate. Since this is impossible when r > 0.5,
Split(Down)Stream always dominates in that scenario.
3.3 Space Overhead The fraction of retained writes r
also determines the space needed to hold the CDP history, so there
is a natural relationship between performance in terms of I/O counts
incurred by writes and CDP space overhead. Figure
6 summarizes the space overhead for the
various architectures. w denotes the number of writes within a
given CDP window, a denotes the size of the addressable storage,
and f denotes the size of the storage actually addressed during
the CDP window. Since the Logging architecture is space efficient,
it can have a lower space cost than a regular volume, whereas the
cost of Split(Down)Stream equals the cost of a regular volume and a
Logging volume combined. Checkpointing saves some space overhead
since the current version is not stored in the history store.
| Architecture | Space Overhead | |
| Regular | a |
| Logging | rw |
| Split(Down)Stream | a + rw |
| Checkpointing | a + rw - f |
Figure 6:
Space overhead of CDP architectures in terms of r, w, a and f, where
w is the total number of writes, r is the proportion of retained writes, a is the size of the addressable storage and
f is the size of the storage actually addressed.
3.4 Retained Writes as a Function of the Granularity
We already mentioned that the proportion
of retained writes r depends on the relationship between the
temporal distance between writes and the granularity. Given a
temporal distance distribution T, we show how to express r in
terms of T and the granularity g. This allows us to infer
properties of both device I/O counts incurred by writes as well as
the space overhead of CDP for any given workload according to its
temporal distance distribution.
We divide the time dimension into a set of fixed length granularity
windows of size g. We assume that the first window starts at a
uniform position between 0 and g. Let R(g) = E(r(g)) where E
denotes expectation.
Claim 3.1
 Proof 3.1
Let w1,¼,wn be the set of writes in our given trace, and
let ai be the temporal distance between wi and the subsequent
write at the same logical address. Let Xi be the random variable
that is 1 iff wi is last in its granularity window, and so is a
retained write. We have that R(g) = E([1/n]åi=1nXi) = [1/n]åi=1nE(Xi).
Now, Xi=1 and wi is a retained write iff it is within distance ai
from the end of the window. Since we place the start of the first granularity
window at a uniform offset, we have that E(Xi)=min([(ai)/g],1). Thus,
E(Xi) = [1/g] òt=0g fi(t), where fi(t)=1 if t £ ai and
is 0 otherwise.
Altogether, R(g)=[1/n] åi=1nE(Xi)=[1/g]òt=0g [1/n] åi=1n fi(t) and [1/n]åi=1n fi(t)=1-T(t).
Proof 3.1
Let w1,¼,wn be the set of writes in our given trace, and
let ai be the temporal distance between wi and the subsequent
write at the same logical address. Let Xi be the random variable
that is 1 iff wi is last in its granularity window, and so is a
retained write. We have that R(g) = E([1/n]åi=1nXi) = [1/n]åi=1nE(Xi).
Now, Xi=1 and wi is a retained write iff it is within distance ai
from the end of the window. Since we place the start of the first granularity
window at a uniform offset, we have that E(Xi)=min([(ai)/g],1). Thus,
E(Xi) = [1/g] òt=0g fi(t), where fi(t)=1 if t £ ai and
is 0 otherwise.
Altogether, R(g)=[1/n] åi=1nE(Xi)=[1/g]òt=0g [1/n] åi=1n fi(t) and [1/n]åi=1n fi(t)=1-T(t).
3.5 I/O Counts as a Function of the Granularity
Given a trace's temporal distance distribution
T, we show how to express d as a function of g, assuming a
certain write cache hit rate (1-c) and under a certain model of
cache replacement. In order to simplify our analysis we will assume
a Least Recently Written (LRW) replacement policy for the write
cache, and will assume that the I/O rate is uniform. This means that
writes wait in cache in a FIFO queue to be destaged, and it follows
that the time interval writes wait from their last access until they
are evicted is roughly constant for all writes. Given a cache hit
rate (1-c), we define the cache window s to be the time
interval that satisfies c=1-T(s) and therefore is a result of this
hit rate under our model.
Recall that d is the proportion of incurred device I/O's in the
logging architecture. A write can result in a device I/O either
because it is retained, or it is evicted from cache before being
overwritten, or both. Recall that in general d ¹ r + c - rc
since being evicted from cache and being retained are not
necessarily independent events.
We show how to express d as a function of the granularity g and
the cache window size s, where c = 1 - T(s):
Claim 3.2
Let R be as defined in claim 3.1.

Proof 3.2
Let w1,¼,wn be the set of writes in our given trace, and
let ai be the temporal distance between wi and the subsequent
write at the same logical address. Let Xi be the random variable
that is 1 iff wi is an incurred write. A write wi is
incurred if it is either last in its granularity window or ai > s
which causes the write to be evicted from the cache. If s ³ g,
then Xi = 1 iff wi is a retained write, because ai > s
implies ai > g so all evicted writes are also retained. Therefore
in this case D(s,g) = R(g).
Assuming s < g, we have D(g,s) = E([1/n]åi=1n Xi) = [1/n]åi=1nE(Xi). Since we place the start of the
first granularity window at a uniform offset, we have:

We define a function fi(t)=1 if t £ ai and is 0 otherwise,
and a function [`(fi)](t)=fi(t) if t £ s and
[`(fi)](t)=fi(s) otherwise. Thus, we get E(Xi) = [1/g]òt=0g [`(fi)](t).
Altogether we get: D(g,s)=[1/n]åi=1nE(Xi)=[1/g] òt=0g [1/n]åi=1n [`(fi)](t) = [1/g] [òt=0s [1/n]åi=1n fi(t) + òt=sg [1/n] åi=1n fi(s)] .
Since we know that for any t Î [0,g] it holds that [1/n]åi=1n fi(t)=1-T(t) we get D(g,s) = [1/g][òt=0s (1 - T(t)) + òt=sg (1-T(s))] = [1/g] [sR(s) + (g-s)(1-T(s))] .
This result can be used to calculate the I/O counts for the other
architectures. Note that once the s = g, further increasing the
cache size will not affect d and so will not provide additional
benefit. This means that for fine granularity, cache size does not
play an important role.
3.6 Discussion
We chose the LRW caching policy because it is simple to analyze and
to implement. The result is a baseline comparison between the
various architectures. Other caching policies such as WOW [15]
could be considered and possibly adapted to the CDP context - this
is a topic for further work. In practice the cache management
policies implemented by modern storage controllers are complex and
involve techniques such as prefetching and write coalescing. We did
not introduce these aspects to our model however in order to keep it
simple.
Our analysis applies to a segregated fast write cache, and an
important topic of further work is to generalize it to the non
segregated case which models the implementation of some storage
controllers.
We already mentioned that a versioned cache is needed to avoid
latency issues for all architectures except for SplitStream.
Assuming a versioned cache, then some of the I/O's incurred by a
write request are synchronous to the destage operation, but
not to the write operation, unless the destage is synchronous to the
write (such as when the write cache is full). Even though I/O's
which are synchronous to a destage may not affect latency, they
limit the freedom of the controller and may effect throughput. These
are topics for further work.
Since there is an order of magnitude difference between random and
sequential I/O bandwidth, the degree of sequentiality of the
incurred I/O's also needs to be taken into account. For both
sequential and random reads, Split(Down)Stream and Checkpointing
architectures behave similarly. Regarding random writes, both
architectures have the potential to convert random I/O to sequential
I/O at the history store. However, for sequential write workloads
Checkpointing seems to have a disadvantage, since on destage
previous versions may need to be copied to the history store
synchronously to the destage, which interferes with the sequential
I/O flow to disk. This can be somewhat offset by optimizations such
as proactively copying many adjacent logical addresses to the
history store together. A more detailed analysis of effect of the
sequentiality of workloads on the performance of the various
architectures, and an empirical evaluation, is outside the scope of
this paper and is a topic for further work.
It would be interesting to do a bottleneck analysis of the various
architectures, although this is beyond the scope of our work. One
point to consider is the timing of the incurred device I/O's and the
resulting effect on the back-end interconnect. In the Checkpointing
architecture, we may see bursts of activity once a CDP granularity
window completes, whereas in the other architectures the additional
load is more evenly spread over time.
4 Performance
In this section we analyze our CDP architectures in the context of both
synthetic and real life workloads. We analyze the properties of the workloads
that affect both CDP performance and space usage, as well as empirically
measuring the performance of the various architectures using a prototype CDP
enabled block device.
4.1 Experimental Setup
To evaluate the CDP architectures we presented in section
2, we implemented a prototype stand alone network
storage server with CDP support. The prototype was written in C
under Linux and offers a block storage I/O interface via the NBD
protocol [5], and can also be run against trace files
containing timestamped I/O's. The prototype has a HTTP management
interface which allows reverting the storage to previous points in
time. The CDP history structures were implemented using the B-Tree
support in the Berkeley DB database library [6]. Our
prototype has been tested extensively using a python test suite and
has also been used to mount file systems.
Our prototype emulates a storage controller's cache with a LRU
replacement policy for reads and LRW (least recently written) policy
for writes. In a typical storage controller, dirty data pages are
battery backed. In the controllers we model, for cost reasons, the
number of these pages is limited to a small fraction of the total
pages in the cache [17]. In our experiments we limited
dirty pages to occupy at most 3% of the total cache size, and we
varied the total cache size in our experiments. Based upon our
experience, a ratio close to 3% is often seen in systems which have
segregated fast write caches. We chose a page size and extent size
of 4KB, and varied the granularity from every write granularity,
across a range of granularity values.
4.2 Workloads
4.2.1 The SPC-1 Benchmark
Storage Performance Council's SPC-1 [9] is a synthetic
storage-subsystem performance benchmark. It works by subjecting the storage
subsystem to an I/O workload designed to mimic realistic workloads found in
typical business critical application such as OLTP systems and mail server
applications. SPC-1 has gained some industry acceptance and storage vendors
such as Sun, IBM, HP, Dell, LSI-Logic, Fujitsu, StorageTek and 3PARData among
others have submitted results for their storage controllers
[8]. The benchmark has been shown to provide a realistic
pattern of I/O work [20] and has recently been used by the research
community [21,15].
We compared the CDP architectures on workloads similar to ones generated by
SPC-1. We used an earlier prototype implementation of the SPC-1 benchmark that
we refer to as SPC-1 Like. The choice of a synthetic workload enabled us to
monitor the effect of modifying workload parameters which is important for
reaching an understanding of the behavior of the CDP architectures. The SPC-1
Like prototype was modified to generate a timestamped trace file instead of
actually submitting the I/O requests. All trace files generated were 1 hour
long.
A central concept in SPC-1 is the Business Scaling Unit (BSU). BSUs are the
benchmark representation of the user population's I/O activity. Each BSU
represents the aggregate I/O load created by a specified number of users who
collectively generate up to 50 I/O's per second. SPC-1 can be scaled by
increasing or decreasing the number of BSUs.
SPC-1 divides the backend storage capacity into so-called
Application Storage Units (ASUs). Three ASUs are defined: ASU-1
representing a "Data Store", ASU-2 representing a "User Store"
and ASU-3 representing a "Log/Sequential Write". Storage is
divided between the ASUs as follows: 45% is assigned to ASU-1, 45%
to ASU-2 and the remaining 10% is assigned to ASU-3. The generated
workload is divided between the ASUs as follows: 59.6% of the
generated I/Os are to ASU-1, 12.3% are to ASU-2 and 28.1% to
ASU-3. Finally, another attribute of the SPC-1 workload is that all
I/O's are 4KB aligned.
4.2.2 cello99 traces
cello99 is a well known block level disk I/O trace taken from the
cello server over a one year period in 1999. cello is the workgroup
file server for the storage systems group at HP labs and the
workload is typical of a research group, including software
development, trace analysis and simulation. At that time, cello was
a K570 class machine (4 cpus) running HP-UX 10.20, with about 2GB of
main memory. We used a trace of the first hour of 3/3/1999.
4.3 Workload Analysis
4.3.1 Temporal Distance Distribution
According to our analysis in sections 3, the
temporal distance distribution is a crucial property of a workload
which influences both performance of the various CDP architectures
in terms of I/O counts and the predicted space usage. We observed
that this distribution for SPC-1 Like traces is determined by the
ratio between the number of BSUs (the load level) and the size of
the target ASU storage. We obtained the same distribution when the
number of BSUs and ASUs is varied according to the same ratio. We
obtained a set of SPC-1 Like traces with different distributions of
overwrite delays by varying this ratio. Increasing the number of
BSUs while keeping the storage size constant means that more
activity takes place in a given unit of time, and this decreases the
expected overwrite delays the workload. We chose to vary the number
of BSUs rather than the target storage size since this allows us to
easily keep a fixed ratio between cache and storage size. For all
trace files the total capacity of the ASUs is kept constant at
100GB. To modify temporal locality we varied the number of BSUs: 33,
50, 75 and 100. Our BSU/ASU ratio of 33 BSU/100 GB is comparable
with certain SPC1 vendor submissions for high end storage
controllers [8], therefore we expect the temporal
distance distribution to be similar.
In all our measurements we ignored I/O's to ASU-3 since it
represents a purely sequential-write workload (a log) and we wanted
to avoid skewing our results according to this. Such a workload is
characterized by very large overwrite delays, and a logging or
special purpose architecture would be most suitable for providing
CDP functionality. Ideally, one could choose a CDP architecture per
protected volume.
Figure 7 shows the temporal distance
distribution in the SPC-1 Like and cello99 traces. Note that for the
SPC-1 Like traces, as the number of BSUs is increased, the average
temporal distance decreases, which indicates that for a given
granularity there is more potential for I/O and space savings. Note
that the temporal distances exhibited by the cello99 are much
shorter than those for the SPC-1 Like traces, and this leads to an
expected difference in behavior of the CDP architectures.
Figure 7:
Temporal Distance Distribution of cello99 and
SPC-1 Like workloads. For a given interval d the graph plots the fraction of
writes with temporal distance £ d to the subsequent write.
4.3.2 Space Overhead and Retained Writes
Figure 8 shows the space overhead of the CDP
Logging architecture as a function of granularity. The storage
overhead of every write (EW) granularity is normalized to 1, and
increasing the granularity reduces the space overhead. Because of the relatively small temporal
distances in the cello99 trace, considerable savings are possible at
very fine granularities in the order of seconds. On the other hand,
the relatively large temporal distances in the SPC-1 traces means
that space savings are obtained only with granularities which are
larger by several orders of magnitude. As shown in figure
6, the space overhead of the logging
architecture equals rw, so our normalized graph is a graph of r,
the proportion of retained writes, as a function of granularity. The
relationship of the space overhead of the other architectures with
granularity is similar, as can be derived from figure
6. We also calculated the expected proportion of retained writes analytically
according to the formula from claim 3.1 and the given
temporal distance distributions for the cello and SPC1 Like traces. Figure
8 compares our analytical results with our empirical ones,
and we see an extremely close match, validating the correctness of our
analysis.
Figure 8:
Tight match between analytical and empirical
measurements of space overhead. The empirical measurements are
normalized by dividing by the storage overhead associated with every
write granularity. The analytical calculation is according to the
formula in claim 3.1.
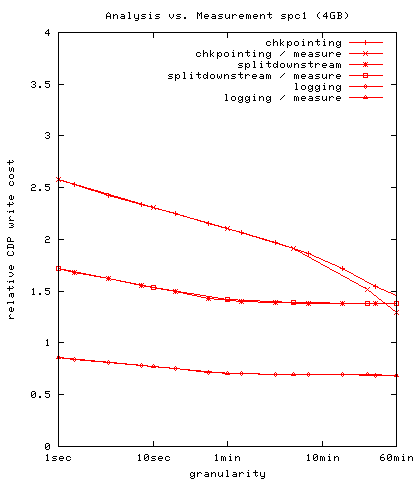
4.3.3 I/O Counts Incurred by Write Requests
We ran our prototype implementations on the Logging, Checkpointing
and SplitDownStream architectures using the SPC1 Like trace with a
100BSU/100GB ratio and 4GB cache, and counted the number of I/O's
incurred by write requests (see figure
9). All I/O counts are normalized
according to the total number of extents written in the trace. At
every write (EW) granularity, the architectures are close to a 1:2:3
ratio as expected according to our analysis. At a granularity
coarser than 5 mins the Logging Architecture is close to the I/O
counts of a regular volume. As the granularity becomes coarser,
there is a very gradual improvement (note the logarithmic scale of
the granularity axis), and SplitDownStream dominates Checkpointing
for granularities up to 30 mins, at which point there is a
crossover. The gradual improvement is a result of a low proportion
of writes with temporal distances up to 5 minutes, as shown in
figure 7. In figure
10, we perform the same
experiment on our SPC1 Like trace with a 33BSU/100GB ratio and 4GB
cache. Because of the reduced temporal locality, SplitDownStream
dominates Checkpointing for 60 minute granularities and beyond.
In figure 11, we plot the empirical results we
obtained for the 100BSU trace against the calculated analytic
results for the same trace. As can be seen there is a close match,
validating our analysis.
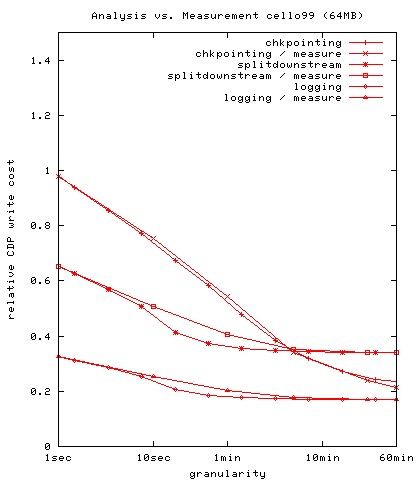
In figure 12, we performed a similar
experiment using the cello99 trace with a cache size of 64MB. As for
the SPC1 Like trace, at every write (EW) granularity the
architectures are close to a 1:2:3 ratio, although the higher
temporal locality of this trace results in a very fast decline of
I/O counts for the checkpointing architecture with an increase in
granularity, and it dominates SplitDownStream at 5 minute and
coarser granularities. At a granularity of 60 mins, I/O counts for
checkpointing approach those Logging and of a regular volume.
In figure 13, we plot the empirical results
we obtained for the cello99 trace against the calculated analytic
results for the same trace. As can be seen there is a close match,
validating our analysis.
Figure 9:
A comparison of I/O counts incurred by
write requests for the CDP architectures as a function of granularity, for the
SPC1 Like trace with 100BSU/100GB. There is a crossover point after 30mins
where Checkpointing overtakes SplitDownStream - note the logarithmic scale of
the X axis.
Figure 10:
A comparison of I/O counts incurred
by write requests for the CDP architectures as a function of granularity, for
the SPC1 Like trace with 33BSU/100GB. Since this trace exhibits less temporal
locality, the crossover point of figure 9 has
moved to beyond 1 hour, in favor of SplitDownStream.
Figure 11:
Tight match between analytical
and empirical measurements of I/O counts for the SPC1 Like
100BSU/100GB trace. The analytical calculation is according to the
analysis developed in 3.
Figure 12:
A comparison of I/O
counts incurred by write requests for the CDP architectures as a
function of granularity, for cello99 with 64MB cache. Checkpointing
dominates SplitDownStream at 5 minute and coarser granularities. The
reason for the very different crossover point is the much larger
degree of temporal locality in the cello99 trace.
Figure 13:
Tight match between analytical and
empirical measurements of I/O counts for cello99 trace. The
analytical calculation is according to the analysis developed in
2
4.3.4 The Effect of Write Cache on I/O Counts
It is clear that increasing the write cache size reduces the I/O
counts for any architecture, assuming the CDP granularity allows
this. According to our analysis, the Checkpointing architecture is
more limited than SplitDownStream in its ability to utilize write
cache to reduce I/O counts. In figure
14, we compare the I/O counts of the
various architectures as the cache size is increased, for the
cello99 trace with 1 second granularity. The performance of all 3
architectures enjoy an increase in cache size, with the
SplitDownStream architecture best able to utilize the additional
cache space. In general we expect an increase in cache size to push
the crossover point between SplitDownStream and Checkpointing to
coarser granularities in favor of SplitDownStream - whereas the
crossover point for 64MB in figure 12
is less than 10 minutes, for approx. 100MB it is exactly 10 minutes,
and for 512MB it is greater that 10 minutes. Note that in this case
a large increase in cache size makes only a small difference to the
crossover granularity. Also note that once the cache size reaches
approximately 256MB, a further increase in cache size does not
further reduce the CDP write cost. For the 256MB cache size, we
found s to be close to 10 minutes, which confirms our analysis
from section 3.5 that predicted this to happen once
s = g.
Figure 14:
Write cache size
versus relative CDP cost in terms of I/O's incurred by write
requests for the 1 hour trace of the cello99 workload with a
granularity of 10 minutes. As the cache size is increased, the cost
reduces faster for the SplitDownStream architecture than for
Checkpointing, and SplitDownStream dominates Checkpointing for cache
sizes over 100MB. Note the exponential scale of the X-axis.
5 Related Work
Although CDP has been gaining momentum in the industry and various products
are available [7,2,4,3] we are not aware of
an enterprise-class storage controller with CDP support available as a product.
There has been some research concerned with implementing
CDP [23,31,14] but to the best of our knowledge we are the first to describe CDP architectures
suitable for implementation in a high-end storage controller.
There has been some work examining every-write block based CDP with a focus
on reducing space overhead [23,31]. The paper describing the Peabody system
makes a case for content-based coalescing of sectors: for the
workloads they investigated, up to 84% of the written sectors have
identical contents to sectors that were written previously and so
could potentially be stored just once [23]. The paper describing the Trap-array system
proposes to reduce the size of the CDP history by storing the compressed result
of the XOR of each block with its previous version, instead of
storing the block data. They find that it is common for only a small
segment of a block to change between versions so that a XOR between
the two versions yields a block containing mostly zeros the
compresses well. Their results show up to two orders of magnitude
space overhead reduction. The resulting cost is that retrieving a block
version requires time proportional to the number of versions between
the target version and the current version [31].
These results seem promising and the ideas presented in these papers can
be considered complementary to our work. It may be interesting to
investigate one of the proposed schemes as function of a variable
protection granularity as neither paper does so.
The Clotho system is a Linux block device driver that supports creating
an unlimited amount of read-only snapshots (versions) [14].
Since snapshot creation is efficient, frequent snapshots are feasible.
Clotho is similar to the logging
architecture in that read access to the current version requires
metadata lookups. Unlike the logging architecture in Clotho access to newer
versions is more efficient than access to historical versions.
Similarly to the Trap-array system, a form of differential compression of extents with
their previous versions is supported however its benefits on
real-world workloads is not quantified.
Point-in-time volume snapshots [12] are a common feature
supported by storage controllers, LVMs, file-systems and NAS boxes. We believe the results of our analysis of the checkpointing architecture are relevant for analysis of the
overhead of periodic point-in-time snapshot support when this is
implemented using COW (copy on write): on overwrite of the block on
the production volume, the previous version of the block is copied
to the snapshot volume. We presented results and analysis which
provide insight into when COW-based architectures should be used and
when alternatives should be considered as protection granularity and
workload vary. We are not aware of prior work which examined the
issue from this perspective.
Network Appliance NAS filers and the Sun ZFS [11] filesystem support snapshotting of
volumes by organizing the filesystem as a tree with user-data at the leaf level and
meta-data held in internal nodes [19]. Each snapshot consists of a separate tree
which may share subtrees with other snapshots. Creating a snapshot volume is done by
creating a new tree root node which points to the same children as the original
volume's root, so that the two volumes are represented by overlapping trees.
Once a snapshot is created on a volume, any blocks which it shares
with the snapshot (initially all blocks) cannot be updated in
place, and all writes to them must be redirected. The first write to a block
after a snapshot causes an entire tree path of meta-data to be allocated and
copied, and linked to from the snapshot volume's tree root. Compared to in-place updates
of meta-data, this approach seems to inherently require writing much more
meta-data, especially for frequent snapshots.
Some of this cost is balanced by delaying writes and then performing them in large sequential
batches, similar to LFS [25].
However at high protection granularity it is not clear how competitive this architecture
is. An investigation of the performance of this architecture as function of
workload and protection granularity may be an interesting further work item.
Other work examined two options for implementing point-in-time
snapshots, referred to as: COW and `redirect on write' (ROW) [30]. The performance of a
volume which has a single snapshot on
it is examined and the two options are compared. No consideration is given to the cost related
to periodically creating a new point-in-time copy. Very roughly the redirect-on-write
architecture can be compared to the logging architecture while the
COW architecture can be compared to our checkpointing architecture.
The I/O cost per write for ROW is 1 I/O and, similarly to the case
for logging, there is an extra meta-data lookup per read as well as
a loss of spacial locality. The intuition that for write-dominated workloads ROW has
an advantage while for read-dominated ones COW is advantageous is experimentally validated
on various workloads. The impact of block size (minimal unit of copying to snapshot)
on performance of the architectures is also investigated. Briefly, smaller block sizes benefit
writes since less space is wasted while it hurts reads because of more
fragmentation.
Versioned file systems [28,27,24,29] keep track of updates
to files and enable access to historical versions. The unit of protection in
these file systems is a file - the user may access a historical version of a
specific file - while in block-based CDP the unit of protection is an entire LUN.
Some of this work discusses the overheads of meta-data related to versioning [24,29] but
our focus has been on the overheads associated with user data. The basic approach of investigating
write related overheads as a function of protection granularity seems applicable to
versioned file systems as well. One difference is that some versioned file systems support protection
granularities that are not a constant amount of time, e.g. all the changes made to a file
between the time it was opened by an application and the time it was closed may be considered
to belong to a single version, whatever the amount of time this happens to take. This is
similar to so called `event-based' CDP where the user/application marks events of interest
rather than deciding beforehand about protection granularity. Extending our model to handle
this may be a further work item.
6 Conclusions
We proposed CDP architectures suitable for integration into storage
controller, and analyzed them both analytically and empirically. Our
analysis predicts the cost of each architecture in terms of
write-related I/O and space overheads, and our empirical results
confirm the analysis. Our work is the first to consider and
accurately describe the effects of varying the CDP granularity. We
show that one of the critical factors affecting both write I/O and
space overheads is the fraction of retained writes which is
determined by the relationship between the temporal distance of
writes and the granularity. Workloads exhibiting high temporal
locality w.r.t. the granularity perform well under the checkpointing
architecture, whereas workloads exhibiting low temporal locality
w.r.t. the granularity perform well under the SplitDownStream
architecture. We analyzed specific workloads and showed that for the
SPC1 Like OLTP workloads, a SplitDownStream architecture is superior
for granularities up to 1 hour. We also showed that the
Checkpointing architecture is superior for a workgroup file server
workload such as cello99 for granularities coarser than 5 minutes.
Aside from CDP, our results can also shed light on the performance
overheads of common implementations of point-in-time copy in terms
of the frequency of taking those copies.
6.1 Further Work
We do not claim definite conclusions regarding the cost of the CDP
architectures for the general class of OLTP workloads or filesystem
workloads. Our evaluation was not extensive enough to substantiate
such claims. However we believe our results lay a foundation for a
thorough investigation of real-world workloads.
A hybrid architecture which combines ideas from the Checkpointing
architecture and the SplitDownStream architecture may offer the best
of both: the behavior of SplitDownStream at higher granularities and
the behavior of Checkpointing at lower granularities. Such an
architecture is an interesting further work item.
Our evaluation did not consider I/O's related to meta-data accesses
to the LPMap CDP History structure. Also ignored in our evaluation
is sequentiality of the write-related traffic. As described the
checkpointing architecture requires 2 synchronous I/O's prior to
cache destages of some pages. Evaluating the impact this has on
performance (as well as attempting to overcome this limitation of
the checkpointing architecture) is a further work item.
Acknowledgments
We would very much like to thank Uri Braun for his
contribution at the early stages of our prototype, Chip Jarvis for
discussions on versioning cache, Bruce McNutt for allowing us access
to an earlier prototype implementation of the SPC-1 benchmark, HP
for access to the cello99 traces, and Binny Gill and Dharmendra
Modha for sending us their WOW prototype. Many thanks also to Kalman
Meth, Sivan Tal, and the anonymous reviewers of the FAST program
committee whose valuable feedback helped improve the paper.
References
- [1]
-
Continuous Data Protection: A Market Update, Byte and Switch
Insider Report, July 2006.
http://www.byteandswitch.com/insider.
- [2]
-
EMC Recover Point.
http://www.emc.com/.
- [3]
-
FalconStor CDP.
http://www.falconstor.com/.
- [4]
-
Mendocino Software, http://www.mendocinosoft.com/.
- [5]
-
Network Block Device.
http://nbd.sourceforge.net/.
- [6]
-
Oracle Berkeley DB.
http://www.oracle.com/database/berkeley-db/index.html.
- [7]
-
Revivio Inc.
http://www.revivio.com/.
- [8]
-
Storage Performance Council, SPC-1 Benchmark Results.
http://www.storageperformance.org/results.
- [9]
-
Storage Performance Council SPC-1 Specification.
http://www.storageperformance.org/specs.
- [10]
-
The IBM TotalStorage DS8000 Series: Concepts and Architecture.
IBM Redbook, 2005, http://www.redbooks.ibm.com/.
- [11]
-
ZFS: The last word in file systems.
http://www.sun.com/2004-0914/feature/.
- [12]
-
A. Azagury, M. E. Factor, J. Satran, and W. Micka.
Point-in-time copy: Yesterday, today and tomorrow.
In Proceedings of IEEE/NASA Conf. Mass Storage Systems, pages
259-270, 2002.
- [13]
-
J. Damoulakis.
Continuous protection.
Storage, June 2004, 3(4):33-39, 2004.
- [14]
-
M. Flouris and A. Bilas.
Clotho: Transparent data versioning at the block I/O level.
In IEEE Symposium on Mass Storage Systems, 2004.
- [15]
-
B. Gill and D. S. Modha.
WOW: Wise ordering for writes combining spatial and temporal
locality in non-volatile caches.
In Proceedings of USENIX File and Storage Technologies, 2005.
- [16]
-
J. S. Glider, C. F. Fuente, and W. J. Scales.
The software architecture of a SAN storage control system.
IBM Systems Journal, 42(2):232-249, 2003.
- [17]
-
M. Hartung.
IBM TotalStorage Enterprise Storage Server: A designer's view.
IBM Systems Journal, 42(2):383-396, 2003.
- [18]
-
J. L. Hennessy and D. A. Patterson.
Computer Architecture : A Quantitative Approach; second
edition.
Morgan Kaufmann, 1996.
- [19]
-
D. Hitz, J. Lau, and M. A. Malcolm.
File system design for an NFS file server appliance.
In Proceedings of the Winter'94 USENIX Technical Conference,
pages 235-246, 1994.
- [20]
-
B. McNutt and S. A. Johnson.
A standard test of I/O cache.
In Proc. of the Computer Measurements Group Conference, 2001.
- [21]
-
N. Megiddo and D. S. Modha.
ARC: A self-tuning, low overhead replacement cache.
In Proceedings of USENIX File and Storage Technologies, San
Francisco, CA., 2003.
- [22]
-
J. Menon.
A performance comparison of RAID-5 and log-structured arrays.
In Fourth IEEE Symposium on High-Performance Distributed
Computing, 1995.
- [23]
-
C. B. Morrey III and D. Grunwald.
Peabody: The time travelling disk.
In IEEE Symposium on Mass Storage Systems, pages 241-253,
2003.
- [24]
-
Z. Peterson and R. Burns.
Ext3cow: a time-shifting file system for regulatory compliance.
ACM Transactions on Storage, 1(2):190-212, May 2005.
- [25]
-
M. Rosenblum and J. K. Ousterhout.
The design and implementation of a log-structured filesystem.
ACM Transactions on Computer Systems, pages 26-52, 1992.
- [26]
-
C. Ruemmler and J. Wilkes.
Unix disk access patterns.
In Proceedings of the Winter USENIX Conference, pages 405-420,
1993.
- [27]
-
D. J. Santry, M. J. Feeley, N. C. Hutchinson, A. C. Veitch, R. W. Carton, and
J. Otir.
Deciding when to forget in the elephant file system.
In SOSP99, Symposium on Operating Systems Principles, 1999.
- [28]
-
M. D. Schroeder, D. K. Gifford, and R. M. Needham.
A caching file system for a programmers workstation.
In Proceedings of the 10th ACM Symposium on Operating Systems
Principles, pages 25-34, 1985.
- [29]
-
C. A. N. Soules, G. R. Goodson, J. D. Strunk, and G. R. Ganger.
Metadata efficiency in versioning file systems.
In Proceedings of USENIX File And Storage Technologies. USENIX,
2003.
- [30]
-
W. Xiao, Y. Liu, Q. K. Yang, J. Ren, and C. Xie.
Implementation and performance evaluation of two snapshot methods on
iSCSI target stores.
In Proceedings of IEEE/NASA Conf. Mass Storage Systems, 2006.
- [31]
-
Q. Yang, W. Xiao, and J. Ren.
TRAP-Array: A disk array architecture providing timely recovery to
any point-in-time.
In Proceedings of International Symposium on Computer
Architecture, 2006.
- [32]
-
Y. Zhou and J. F. Philbin.
The multi-queue replacement algorithm for second level buffer caches.
In Proceedings of USENIX Annual Tech. Conf., Boston, MA, pages
91-104, 2001.
|