

| Pp. 1–12 of the Proceedings |  |
Chuck Lever, AOL-Netscape, Incorporated
<chuckl@netscape.com>
Stephen Tweedie, Red Hat Software
<sct@redhat.com>
Linux Scalability Project
Center for Information Technology Integration
University of Michigan, Ann Arbor
linux-scalability@citi.umich.edu
http://www.citi.umich.edu/projects/linux-scalability
Abstract
| Linux introduces POSIX Real Time signals to report I/O activity on multiple connections with more scalability than traditional models. In this paper we explore ways of improving the scalability and performance of POSIX RT signals even more by measuring system call latency and by creating bulk system calls that can deliver multiple signals at once. |
This document was written as part of the Linux Scalability Project.
The work described in this paper was supported via generous grants
from the Sun-Netscape Alliance, Intel, Dell, and IBM.
This document is Copyright © 2000 by AOL-Netscape, Inc.,
and by the Regents of the University of Michigan.
Trademarked material referenced in this document is copyright
by its respective owner.
The RT signal queue is a limited resource. When it is exhausted, the kernel signals an application to switch to polling, which delivers multiple completion events at once. Even when no signal queue overflow happens, however, RT signals may have inherent limitations due to the number of system calls needed to manage events on a single connection. This number may not be critical if the queue remains short, for instance while server workload is easily handled. When the server becomes loaded, the signal queue can cause system call overhead to dominate server processing, with the result that events are forced to wait a long time in the signal queue.
Linux has been carefully designed so that system calls are not much more expensive than library calls. There are no more cache effects for a system call than there are for a library call, and few virtual memory effects because the kernel appears in every process’s address space. However, added security checks during system calls and hardware overhead caused by crossing protection domains make it expedient to avoid multiple system calls when fewer will do.
Process switching is still comparatively expensive, often resulting in TLB flushes and virtual memory overhead. If a system call must sleep, it increases the likelihood that the kernel will switch to a different process. By lowering the number of system calls required to accomplish a given task, we reduce the likelihood of harm to an application’s cache resident set.
Improving the scalability and reducing the overhead of often-used system calls has a direct impact on the scalability of network servers [1, 4]. Reducing wait time for blocking system calls gives multithreaded server applications more control over when and where requested work is done. Combining several functions into fewer system calls has the same effect.
In this paper, we continue work begun in "Scalable Network I/O for Linux" by Provos, et al. [9]. We measure the effects of system call latency on the performance and scalability of a simple web server based on an RT signal event model. Of special interest is the way server applications gather pending RT signals. Today applications use sigwaitinfo() to dequeue pending signals one at a time. We create a new interface, called sigtimedwait4(), that is capable of delivering multiple signals to an application at once.
We use phhttpd as our web server. Phhttpd is a static-content caching front end for full-service web servers such as Apache [8]. Brown created phhttpd to demonstrate the POSIX RT signal mechanism, added to Linux during the 2.1 development series and completed during the 2.3 series [2]. We drive our test server with httperf [6]. An added client creates high-latency, low-bandwidth connections, as in Banga and Druschel [7].
Section 2 introduces POSIX Real-Time signals and describes how server designers can employ them. It also documents the phhttpd web server. Section 3 motivates the creation of our new system call. We describe our benchmark in Section 4, and discuss the results of the benchmark in Section 5. We conclude in Section 6.
An application follows these steps to enable signal-driven I/O:
This mechanism cannot say what file descriptor caused the signal, thus it is not useful for servers that manage more than one TCP socket at a time. Since its inception, it has been used successfully only with UDP-based servers [10].
Unlike normal signals, however, RT signals can queue in the kernel. If a normal signal occurs more than once before the kernel can deliver it to an application, the kernel delivers only one instance of that signal. Other instances of the same signal are dropped. However, RT signals are placed in a FIFO queue, creating a stream of event notifications that can drive an application’s response to incoming requests. Typically, to avoid complexity and race conditions, and to take advantage of the information available in siginfo_t structures, applications mask the chosen RT signals during normal operation. An application uses sigwaitinfo() or sigtimedwait() to pick up pending signals synchronously from the RT signal queue.
The kernel must generate a separate indication if it cannot queue an RT signal, for example, if the RT signal queue overflows, or kernel resources are temporarily exhausted. The kernel raises the normal signal SIGIO if this occurs. If a server uses RT signals to monitor incoming network activity, it must clear the RT signal queue and use another mechanism such as poll() to discover remaining pending activity when SIGIO is raised.
Finally, RT signals can deliver a payload. Sigwaitinfo() returns a siginfo_t struct (see Fig. 1) for each signal. The _fd and _band fields in this structure contain the same information as the fd and revents fields in a pollfd struct (see Fig. 2).
struct siginfo {
int si_signo;
int si_errno;
int si_code;
union {
/* other members elided */
struct {
int _band;
int _fd;
} _sigpoll;
} _sifields;
} siginfo_t;
Figure 1. Simplified siginfo_t struct.
struct pollfd {
int fd;
short events;
short revents;
};
Figure 2. Standard pollfd struct
POSIX semantics for signal delivery do not guarantee that threads waiting in sigwait() will receive particular signals. According to the standard, an external signal is addressed to the whole process (the collection of all threads), which then delivers it to one particular thread. The thread that actually receives the signal is any thread that does not currently block the signal. Thus, only one thread in a process should wait for normal signals while all others should block them.
In Linux, however, each thread is a kernel process with its own PID, so external signals are always directed to one particular thread. If, for instance, another thread is blocked in sigwait() on that signal, it will not be restarted.
This is an important element of the design of servers using an RT signals-based event core. All normal signals should be blocked and handled by one thread. On Linux, other threads may handle RT signals on file descriptors, because file descriptors are "owned" by a specific thread. The kernel will always direct signals for that file descriptor to its owner.
When a socket is closed on the remote end, the local kernel queues a POLL_HUP event to indicate the remote hang-up. POLL_IN signals occurring earlier in the event stream usually cause an application to read a socket, and when it does in this case, it receives an EOF. Applications that close sockets when they receive POLL_HUP must ignore any later signals for that socket. Likewise, applications must be prepared for reads to fail at any time, and not depend only on RT signals to manage socket state.
Because RT signals queue unlike normal signals, server applications cannot treat these signals as interrupts. The kernel can immediately re-use a freshly closed file descriptor, confusing an application that then processes (rather than ignores) POLL_IN signals queued by previous operations on an old socket with the same file descriptor number. This introduces to the unwary application designer significant vulnerabilities to race conditions.
Instead of handling incoming requests with signals, phhttpd may use polling threads instead. Usually, though, phhttpd creates a set of RT signal worker threads, and a matching set of polling threads known as sibling threads. The purpose of sibling threads is described later.
Each RT signal worker thread masks off the file descriptor signal, then iterates, picking up each RT signal via sigwaitinfo() and processing it, one at a time. To reduce system call rate, phhttpd read()s on a new connection as soon as it has accept()ed it. Often, on high-bandwidth connections, data is ready to be read as soon as a connection is accept()ed. Phhttpd reads this data and sends a response immediately to prevent another trip through the "event" loop, reducing the negative cache effects of handling other work in between the accept and the read operations.
Because the read operation is non-blocking, it fails with EAGAIN if data is not immediately present. The thread proceeds normally back to the "event" loop in this case to wait for data to become available on the socket.
Logic exists to handle the request via sendfile() instead. In the long run, this may be more efficient for several reasons. First, there is a limited amount of address space per process. This limits the total number of cached bytes, especially because these bytes share the address space with the pre-formed responses, hash information, heap and stack space, and program text. Using sendfile() allows data to be cached in extended memory (memory addressed higher than one or two gigabytes). Next, as the number of mapped objects grows, mapping a new object takes longer. On Linux, finding an unused area of an address space requires at least one search that is linear in the number of mapped objects in that address space. Finally, creating these maps requires expensive page table and TLB flush operations that can hurt system-wide performance, especially on SMP hardware.
On a server handling perhaps thousands of connections, this creates considerable overhead during a period when the server is already overloaded. We modified the queue overflow handler to reduce this overhead. The server now handles signal queue overflow in the same thread as the RT signal handler; sibling threads are no longer needed. This modification appears in phhttpd version 0.1.2. It is still necessary, however, to build a fresh poll_fd array completely during overflow processing. This overhead slows the server during overflow processing, but can be reduced by maintaining the poll_fd array concurrently with signal processing.
RT signal queue overflow is probably not as rare as some would like. Some kernel designs have a single maximum queue size for the entire system. If any aberrant application stops picking up its RT signals (the thread that picks up RT signals may cause a segmentation fault, for example, while the rest of the application continues to run), the system-wide signal queue will fill. All other applications on the system that use RT signals will eventually be unable to proceed without recovering from a queue overflow, even though they are not the cause of it.
It is well known that Linux is not a real-time operating system, and that unbounded latencies sometimes occur. Application design may also prohibit a latency upper bound guarantee. These latencies can delay RT signals, causing the queue to grow long enough that recovery is required even when servers are fast enough to handle heavy loads under normal circumstances.
Our new system call interface combines the multiple result delivery of poll() with the efficiency of POSIX RT signals. The interface prototype appears in Fig. 3.
int sigtimedwait4(const sigset_t *set, siginfo_t *infos, int nsiginfos, const struct timespec *timeout);Figure 3. sigtimedwait4() prototype Like its cousin sigtimedwait(), sigtimedwait4() provides the kernel with a set of signals in which it is interested, and a timeout value that is used when no signals are immediately ready for delivery. The kernel selects queued pending signals from the signal set specified by set, and returns them in the array of siginfo_t structures specified by infos and nsiginfos.
Providing a buffer with enough room for only one siginfo_t struct forces sigtimedwait4() to behave almost like sigtimedwait(). The only difference is that specifying a negative timeout value causes sigtimedwait4() to behave like sigwaitinfo(). The same negative timeout instead causes an error return from sigtimedwait().
Retrieving more than one single signal at a time has important benefits. First and most obviously, it reduces the average number of transitions between user space and kernel space required to process a single server request. Second, it reduces the number of times per signal the per-task signal spinlock is acquired and released. This improves concurrency and reduces cache ping-ponging on SMP hardware. Third, it amortizes the cost of verifying the user's result buffer, although some believe this is insignificant. Finally, it allows a single pass through the signal queue for all pending signals that can be returned, instead of a pass for each pending signal.
The sigtimedwait4() system call enables efficient server implementations by allowing the server to "compress" signals-- if it sees multiple read signals on a socket, for instance, it can empty that socket's read buffer just once.
The sys_rt_sigtimedwait() function is a moderate CPU consumer in our benchmarks, according to the results of kernel EIP histograms. About three fifths of the time spent in the function occurs in the second critical section in Fig. 4.
spin_lock_irq(¤t->sigmask_lock);
sig = dequeue_signal(&these, &info);
if (!sig) {
sigset_t oldblocked = current->blocked;
sigandsets(¤t->blocked,
¤t->blocked, &these);
recalc_sigpending(current);
spin_unlock_irq(¤t->sigmask_lock);
timeout = MAX_SCHEDULE_TIMEOUT;
if (uts)
timeout = (timespec_to_jiffies(&ts)
+ (ts.tv_sec || ts.tv_nsec));
current->state = TASK_INTERRUPTIBLE;
timeout = schedule_timeout(timeout);
spin_lock_irq(¤t->sigmask_lock);
sig = dequeue_signal(&these, &info);
current->blocked = oldblocked;
recalc_sigpending(current);
}
spin_unlock_irq(¤t->sigmask_lock);
Figure 4. This excerpt of the sys_rt_sigtimedwait() kernel function shows two critical sections. The most CPU time is consumed in the second critical section.
The dequeue_signal() function contains some complexity that we can amortize across the total number of dequeued signals. This function walks through the list of queued signals looking for the signal described in info. If we have a list of signals to dequeue, we can walk the signal queue once picking up all the signals we want.
Our benchmark configuration contains only a single client host and a single server host, which makes the simulated workload less realistic. However, our benchmark results are strictly for comparing relative performance among our implementations. We believe the results also give an indication of real-world server performance.
A web server's static performance naturally depends on the size distribution of requested documents. Larger documents cause sockets and their corresponding file descriptors to remain active over a longer time period. As a result the web server and kernel have to examine a larger set of descriptors, making the amortized cost of polling on a single file descriptor larger. In our tests, we request a 1 Kbyte document, a typical index.html file from the monkey.org web site.
Most web server benchmarks don't simulate high-latency connections, which appear to cause difficult-to-handle load on real-world servers [6]. This client program opens a connection, but does not complete an http request. To keep the number of high-latency clients constant, these clients reopen their connection if the server times them out.
In previous work, we noticed server performance change as the number of inactive connections varied [9]. As a result of this work, one of the authors modified phhttpd to correct this problem. The latest version of phhttpd (0.1.2 as of this writing) does not show significant performance degradation as the number of inactive connections increases. Therefore, the benchmark results we present here show performance with no extra inactive connections.
There are several system limitations that influence our benchmark procedures. There are only a limited number of file descriptors available for single processes; httperf assumes that the maximum is 1024. We modified httperf to cope dynamically with a large number of file descriptors. Additionally, because we use only a single client and server in our test harness, we can have only about 60,000 open sockets at a single point in time. When a socket closes it enters the TIMEWAIT state for sixty seconds, so we must avoid reaching the port number limitation. We therefore run each benchmark for 35,000 connections, and then wait for all sockets to leave the TIMEWAIT state before we continue with the next benchmark run. In the following tests, we run httperf with 4096 file descriptors, and phhttpd with five thousand file descriptors.
A user-level program later extracts the hash data and creates a histogram of CPU time matched against the kernel's symbol table. The resulting histogram demonstrates which routines are most heavily used, and how efficiently they are implemented. The granularity of the histogram allows us to see not only which functions are heavily used, but also where the most time is spent in each function.
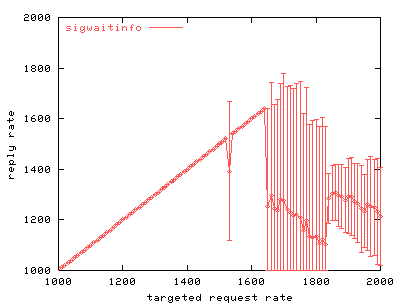
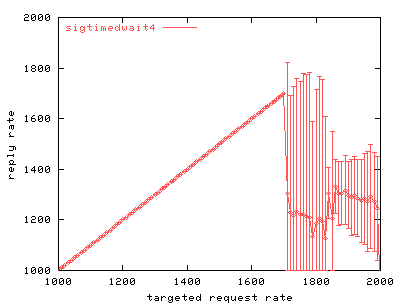
Our first test compares the scalability of unmodified phhttpd using sigwaitinfo() to collect one signal at a time with the scalability of phhttpd using sigtimedwait4() to collect many signals at once. The modified version of phhttpd picks up as many as 500 signals at once during this test.
|
|
| Graph 1. Scalability of the phhttpd web server. This graph shows how a single threaded phhttpd web server scales as request rate increases. The axes are in units of requests per second. | Graph 2. Scalability of phhttpd using sigtimedwait4(). The signal buffer size was five hundred signals, meaning that the web server could pick up as many as five hundred events at a time. Compared to Graph 1, there is little improvement. |
Graphs 1 and 2 show that picking up more than one RT signal at a time gains little. Only minor changes in behavior occur when varying the maximum number of signals that can be picked up at once. The maximum throughput attained during the test increases slightly.
This result suggests that the largest system call bottleneck is not where we first assumed. Picking up signals appears to be an insignificant part of server overhead. We hypothesize that responding to requests, rather than picking them up, is where the server spends most of its effort.
Mogul, et al., refer to "receive livelock," a condition where a server is not deadlocked, but makes no forward progress on any of its scheduled tasks [12]. This is a condition that is typical of overloaded interrupt-driven servers: the server appears to be running flat out, but is not responding to client requests. In general, receive livelock occurs because processing a request to completion takes longer than the time between requests.
Mogul's study finds that dropping requests as early as possible results in more request completions on overloaded servers. While the study recommends dropping requests in the hardware interrupt level or network protocol stack, we instead implement this scheme at the application level. When the web server becomes overloaded, it resets incoming connections instead of processing the requests.
To determine that a server is overloaded, we use a weighted load average, essentially the same as the TCP round trip time estimator [11, 13, 14]. Our new sigtimedwait4() system call returns as many signals as can fit in the provided buffer. The number of signals returned each time phhttpd invokes sigtimedwait4() is averaged over time. When the load average exceeds a predetermined value, the server begins rejecting requests.
Instead of dropping requests at the application level, using the listen backlog might allow the kernel to drop connections even before the application becomes involved in handling a request. Once the backlog overflows, the server's kernel can refuse connections, not even passing connection requests to the server application, further reducing the workload the web server experiences. However, this solution does not handle bursty request traffic gracefully. A moving average such as the RTT estimator smoothes out temporary traffic excesses, providing a better indicator of server workload over time.
The smoothing function is computed after each invocation of sigtimedwait4(). The number of signals picked up by sigtimedwait4() is one of the function's parameters:

In our implementation, phhttpd picks up a maximum of 23 signals. If Avg exceeds 18, phhttpd begins resetting incoming connections. Experimentation and the following reasoning influenced the selection of these values. As the server picks up fewer signals at once, the sample rate is higher but the sample quantum is smaller. Only picking up one signal, for example, means we're either overloaded, or we're not. This doesn't give a good indication of the server's load. As we increase the signal buffer size, the sample rate goes down (it takes longer before the server calls sigtimedwait4() again), but the sample quantum improves. At some point, the sample rate becomes too slow to adequately detect and handle overload. That is, if we pick up five hundred signals at once, the server either handles or rejects connections for all five hundred signals.
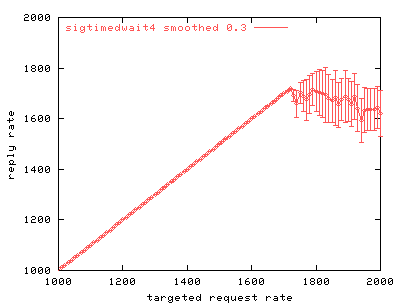
The gain value determines how quickly the server reacts to full signal buffers (our "overload" condition). When the gain value approaches 1, the server begins resetting connections almost immediately during bursts of requests. Reducing the gain value allows the server to ride out smaller request bursts. If it is too small, the server may fail to detect overload, resulting in early performance degradation. We found that a gain value of 0.3 was the best compromise between smooth response to traffic bursts and overload reaction time.
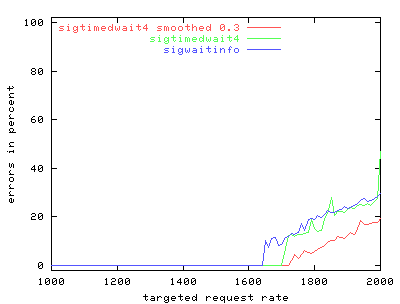
Graphs 3 and 4 reveal an improvement in overload behavior when an overloaded server resets connections immediately instead of trying to fulfill the requests. Server performance levels off then declines slowly, rather than dropping sharply. In addition, connection error rate is considerably lower.
|
|
| Graph 3. Scalability of phhttpd with averaged load limiting. Overload behavior improves considerably over the earlier runs, which suggests that formulating and sending responses present much greater overhead for the server than handling incoming signals. | Graph 4. Error rate of phhttpd with averaged load limiting. When the server drops connections on purpose, it actually reduces its error rate. |
Further, we demonstrate that more work is done during request processing than in handling and dispatching incoming signals. Lowering signal processing overhead in the Linux kernel has little effect on server performance, but reducing request processing overhead in the web server produces a significant change in server behavior.
It remains to be seen whether this request processing latency is due to:
Even though sending the response back to clients requires a copy operation, it is otherwise nonblocking. Finding the response in the server's cache should also be fast, especially considering the cache in our test contains only a single document. Thus we believe future work in this area should focus on the performance of the system calls and server logic that accept and perform the initial read on incoming connections.
This paper considers server performance with a single thread on a single processor to simplify our test environment. We should also study how RT signals behave on SMP architectures. Key factors influencing SMP performance and scalability include thread scheduling policies, the cache-friendliness of the kernel implementation of RT signals, and how well the web server balances load among its worker threads.
[2] Z. Brown, phhttpd, www.zabbo.net/phhttpd, November 1999.
[3] Signal driven IO (thread), linux-kernel mailing list, November 1999.
[4] G. Banga. P. Druschel. J. C. Mogul. "Better Operating System Features for Faster Network Servers," SIGMETRICS Workshop on Internet Server Performance, June 1998.
[5] J. C. Hu, I. Pyarali, D. C. Schmidt, "Measuring the Impact of Event Dispatching and Concurrency Models on Web Server Performance Over High-Speed Networks," Proceedings of the 2nd IEEE Global Internet Conference, November 1997.
[6] D. Mosberger and T. Jin, "httperf -- A Tool for Measuring Web Server Performance," SIGMETRICS Workshop on Internet Server Performance, June 1998.
[7] G. Banga and P. Druschel, "Measuring the Capacity of a Web Server," Proceedings of the USENIX Symposium on Internet Technologies and Systems, December 1997.
[8] Apache Server, The Apache Software Foundation. www.apache.org.
[9] N. Provos and C. Lever, "Scalable Network I/O in Linux," Proceedings of the USENIX Technical Conference, FREENIX track, June 2000.
[10] W. Richard Stevens, UNIX Network Programming, Volume I: Networking APIs: Sockets and XTI, 2nd edition, Prentice Hall, 1998.
[11] W. Richard Stevens, TCP/IP Illustrated, Volume 1: The Protocols, pp. 299-309, Addison Wesley professional computing series, 1994.
[12] J. C. Mogul, K. K. Ramakrishnan, "Eliminating Receive Livelock in an Interrupt-driven Kernel," Proceedings of USENIX Technical Conference, January 1996.
[13] P. Karn and C. Partridge, "Improving Round-Trip Time Estimates in Reliable Transport Protocols," Computer Communication Review, pp. 2-7, vol. 17, no. 5, August 1987.
[14] V. Jacobson, "Congestion Avoidance and Control," Computer Communication Review, pp. 314-329, vol. 18, no. 4, August 1988.
[15] 1003.1b-1993 POSIX -- Part 1: API C Language -- Real-Time Extensions (ANSI/IEEE), 1993. ISBN 1-55937-375-X.
[16] GNU info documentation for glibc.
SIGTIMEDWAIT4(2) Linux Programmer's Manual SIGTIMEDWAIT4(2)
NAME
sigtimedwait4 - wait for queued signals
SYNOPSIS
#include
int sigtimedwait4(const sigset_t *set, siginfo_t *infos,
int nsiginfos, const struct timespec *timeout);
typedef struct siginfo {
int si_signo; /* signal from signal.h */
int si_code; /* code from above */
...
int si_value;
...
} siginfo_t;
struct timespec {
time_t tv_sec; /* seconds */
long tv_nsec; /* and nanoseconds */
};
DESCRIPTION
sigtimedwait4() selects queued pending signals from the set
specified by set, and returns them in the array of
siginfo_t structs specified by infos and nsiginfos.
When multiple signals are pending, the lowest numbered ones
are selected. The selection order between realtime and non-
realtime signals, or between multiple pending non-realtime
signals, is unspecified.
sigtimedwait4() suspends itself for the time interval
specified in the timespec structure referenced by timeout.
If timeout is zero-valued, or no timespec struct is
specified, and if none of the signals specified by set is
pending, then sigtimedwait4() returns immediately with the
error EAGAIN. If timeout contains a negative value, an
infinite timeout is specified.
If no signal in set is pending at the time of the call,
sigtimedwait4() suspends the calling process until one or
more signals in set become pending, until it is inter-
rupted by an unblocked, caught signal, or until the timeout
specified by the timespec structure pointed to by
timeout expires.
If, while sigtimedwait4() is waiting, a signal occurs which
is eligible for delivery (i.e., not blocked by the process
signal mask), that signal is handled asynchronously and
the wait is interrupted.
If infos is non-NULL, sigtimedwait4() returns as many
queued signals as are ready and will fit in the array
specified by infos. In each siginfo_t struct, the selected
signal number is stored in si_signo, and the cause of the
signal is stored in the si_code. If a payload is queued with
the signal, the payload value is stored in si_value.
If the value of si_code is SI_NOINFO, only the si_signo
member of a siginfo_t struct is meaningful, and the value of
all other members of that siginfo_t struct is unspecified.
If no further signals are queued for the selected signal,
the pending indication for that signal is reset.
RETURN VALUES
sigtimedwait4() returns the count of siginfo_t structs it
was able to store in the buffer specified by infos and
nsiginfos. Otherwise, the function returns -1 and sets
errno to indicate any error condition.
ERRORS
EINTR The wait was interrupted by an unblocked, caught
signal.
ENOSYS sigtimedwait4() is not supported by this
implementation.
EAGAIN No signal specified by set was delivered within
the specified timeout period.
EINVAL timeout specified a tv_nsec value less than 0 or
greater than 1,000,000,000.
EFAULT The array of siginfo_t structs specified by
infos and nsiginfos was not contained in the
calling program's address space.
CONFORMING TO
Linux
AVAILABILITY
The sigtimedwait4() system call was introduced in Linux
2.4.
SEE ALSO
time(2), sigqueue(2), sigtimedwait(2), sigwaitinfo(2)
Linux 2.4.0 Last change: 23 August 2000 1
|
This paper was originally published in the
Proceedings of the 4th Annual Linux Showcase and Conference, Atlanta,
October 10-14, 2000, Atlanta, Georgia, USA
Last changed: 8 Sept. 2000 bleu |
|