|
USENIX '04 Paper
[USENIX '04 Technical Program]



Flashback: A Lightweight Extension for Rollback and
Deterministic Replay for Software Debugging ![[*]](footnote.png)
Sudarshan M. Srinivasan, Srikanth Kandula, Christopher R. Andrews and Yuanyuan Zhou
{smsriniv, kandula, crandrws, yyzhou}@cs.uiuc.edu

Abstract:
Software robustness has significant impact on system availability.
Unfortunately, finding software bugs is a very challenging task
because many bugs are hard to reproduce.
While debugging a program, it would be very useful to rollback a
crashed program to a previous execution point and deterministically
re-execute the ``buggy'' code region.
However, most previous work on rollback and replay support was
designed to survive hardware or operating system failures, and is
therefore too heavy-weight for the fine-grained rollback and replay
needed for software debugging.
This paper presents Flashback, a lightweight OS extension that
provides fine-grained rollback and replay to help debug
software. Flashback uses shadow processes to efficiently roll back
in-memory state of a process, and logs a process' interactions with
the system to support deterministic replay. Both shadow processes and
logging of system calls are implemented in a lightweight fashion
specifically designed for the purpose of software debugging.
We have implemented a prototype of Flashback in the Linux operating
system. Our experimental results with micro-benchmarks and real
applications show that Flashback adds little overhead and can quickly
roll back a debugged program to a previous execution point and
deterministically replay from that point.
1 Introduction
As rapid advances in computing hardware have led to dramatic
improvements in computer performance, issues of reliability,
maintainability, and cost of ownership are becoming increasingly
important. Unfortunately, software bugs are as frequent as ever,
accounting for as much as 40% of computer system
failures [45]. Software bugs may crash a production
system, making services unavailable. Moreover, ``silent'' bugs that
run undetected may corrupt valuable information. According to the
National Institute of Standards and Technology [48], software
bugs cost the U.S. economy an estimated $59.5 billion annually,
approximately 0.6% of the gross domestic product! Given the
magnitude of this problem, the development of effective debugging
tools is imperative.
Software debugging has been the focus of much research. Popular
avenues of such research include detection and analysis of data
races [7,23,46,63,68,69,74], static
compiler-based techniques to detect potential bugs [20,24,31,36,64,76] possibly aided by static checking of user-directed
rules [19,27,81], run-time checking of data
types to detect some classes of memory-related
bugs [41,49], and more extensive
run-time checks to detect more complex program
errors [28,51]. These studies have proposed
effective solutions to statically or dynamically detect certain types
of software bugs.
Even though previous solutions have shown promising results, most
software bugs still rely on programmers to interactively debug using
tools such as gdb. Interactive debugging can be a very challenging
task because some bugs occur only after hours or even days of
execution. Some of them occur only with a particular combination of
user input and/or hardware configurations. Moreover, some bugs, such
as data races, are particularly hard to find because they only occur
with a particular interleaved sequence of timing-related events.
These problems motivate the need for low-overhead debugging support
that allows programmers to rollback to a previous execution point and
re-execute the buggy code region.
A deterministic replay recreates the precise conditions that lead to
the bug and helps to understand the causes of the bug.
In most debugging tools today, if an error occurs, the program needs
to be restarted from the very beginning and may take hours or even
days to reach the buggy state. If the bug is time-related, the bug may
not occur during re-execution. It would be very useful if an
interactive debugger such as gdb can periodically checkpoint the
process state of the debugged program during its dynamic execution.
If an error occurs, the programmer can request gdb to rollback to a
previous state and then deterministically replay the program from this
state so that the programmer can see how the bug manifests in order to
catch its root cause.
Though system support for rollback and replay has been studied in the
past, most previous approaches are too heavy-weight to support
software debugging. The main reason is that these approaches are
geared toward surviving hardware or operating system
failures. Therefore, most of these systems checkpoint program state to
secondary storage such as disk, remote memory or non-volatile
memory [3,10,12,34,37,38,39,54,61,77,79,82]. Correspondingly, these systems incur far higher overhead
than is necessary or permissible to support software debugging.
Unlike hardware/OS failures, we only need to rollback and replay a
program when it crashes due to software bugs. Moreover, most previous
systems cannot afford frequent checkpointing because of the high
overheads involved in these approaches. As a result, applications may
have to roll back to a point in the distant past (e.g., 1-2 hours
ago).
Besides checkpointing systems, other work on rollback support - such
as transaction support for main-memory data structures [11,29,40,43,60,62], system
recovery [9,42,65,72] or
logging and replay of system events [6,33,50,66,70] - either have problems similar to previous
checkpointing systems or require applications to be rollback-aware.
These limitations hinder the effectiveness of these solutions for
software debugging of general programs.
In this paper, we present a lightweight OS extension called Flashback that provides rollback and deterministic replay support for
software debugging. In order to efficiently capture the in-memory state
of an executing process, Flashback uses shadow processes to
replicate a program's execution state. Moreover, Flashback also
captures the interactions between a program and the rest of the system
- such as system calls, signals, and memory mapped regions - to allow
for subsequent deterministic re-execution. We have developed a
prototype of our proposed solution in the Linux operating system that
implements a subset of the features. Our experimental results with
micro-benchmarks and real applications show that our system adds little
overhead and can quickly roll back to a previous execution point.
As an example of how deterministic replay support can be used for
debugging, we also explore the necessary extensions to gdb in order to
provide user support for checkpointing, rollback and deterministic
replay. These extensions will allow programmers to roll back a program
to a previous state when something has gone awry, and interactively
replay the buggy code region. With such support, the programmer does
not need to restart the execution of the program or to worry about the
reproducibility of the bug.
This paper is organized as follows. Section 2
describes the motivation and background of our work.
Section 3 presents an overview of Flashback, and
sections 4 and 5 describe in greater
detail our approach for rollback of state and deterministic
replay. Section 6 presents the experimental results.
Section 7 discusses the modifications that have been made
to gdb in order to control logging, rollback and recovery from within
the debugger. Section 8 concludes the paper with a
brief discussion of our experience as well as plans for future work.
2 Background and Related Work
Our work builds upon two groups of research: system support for
debugging and system support for rollback. In this section we discuss
closely related work done in these two directions.
Software debugging has been the subject of substantial research and
development. Existing approaches mainly include compile-time static
checking, run-time dynamic checking and hardware support for
debugging. Some representative compile-time static checkers were
proposed by Wagner [75,76], Lujan [44]
Evans [21], Engler [19,27,81].
Examples of run-time dynamic checkers include Rational's
Purify [30], KAI's Assure [35], Lam et. al.'s
DIDUCE [28,51] and several
others [41,49,15,53,58,63].
Recently, several hardware architecture techniques have been proposed
to detect
bugs [26,1,14,47,56].
While these compile-time, run-time or hardware techniques are very
useful in catching certain types of bugs, many bugs still cause the
programmer to rely on interactive debuggers such as gdb. To
characterize timing-related bugs such as race conditions, simply
rerunning the program with the same input may not reproduce the same
bug. Moreover, some bugs may appear only after running the program for
several hours, making the debugging process a formidable task. To
understand and find root causes of such bugs, it is very useful to
provide system support for reproducing the occurring bug, which may
only appear for a particular combination of user inputs and
configurations or after a particular interleaved sequence of time-related
events.
One effective method to reproduce a bug is to roll back to a previous
execution state in the vicinity of the buggy code, and deterministically
replay the execution either interactively inside a debugger or
automatically with heavy instrumentation. This requires an efficient
rollback and deterministic replay mechanism.
Rollback capability is provided in many systems including
checkpointing systems, main-memory transaction systems and software
rejuvenation.
Checkpointing has been studied extensively in the past. Checkpointing
enables storing the previous execution state of a system in a
failure-independent location. When the system fails, the program can
restart from the most recent checkpoint in either a different machine
or the same machine after fixing the cause of the failure. Since most
checkpointing systems assume that the entire system may fail,
checkpoint data is stored either in
disks [12,34,37,38,39,79,61],
remote memory [3,54,82] and
non-volatile or persistent memory [10,80]. As a
result, most checkpoint systems incur high overhead and cannot afford
to take frequent checkpoints. They are, therefore, too heavy-weight to
support rollback for software debugging.
Systems that provide transaction support for main-memory data
structures also allow applications to rollback to a previous execution
point [11,29,43,60,62]. For example,
Lowell and Chen have developed a system that provides transaction
support in the Rio Vista recoverable virtual memory
system [11,43]. Most of these approaches require
applications to be written using the transaction programming
model; consequently they cannot be conveniently used for
debugging a general program.
Borg et al developed a system [5] that provides fault
tolerance by maintaining an inactive backup process. In the event of a
system failure, the backup process can take over the execution of a
process that crashes. The backup process is kept up-to-date by
making available to it all the messages that the active process
received. Their implementation is based on the assumption that two
processes starting from the same initial state will perform
identically upon receiving the same input.
While this assumption holds for recovery-based systems, it is not the
case for general software since the state of the rest of the system
may have changed in the meantime. Deterministic replay of a process
requires that it receive the same non-deterministic events during
replays as during the original run. These events include responses to
system calls, shared memory accesses, signals, network messages
et al.
Recovery-oriented computing [25,52] is a recent
research initiative that adopts the approach that errors are
inevitable, so support for recovering from errors is essential for
developing and validating highly available software. Though this is an
interesting approach to software availability, most studies in
software rejuvenation so far [4,32,57]
have focused on restarting the whole application rather than
fine-grained rollback. Crash-only software [8] is a
recent approach to software development that improves the availability
of software by using component building blocks that can crash and
restart quickly instead of aiming for fault tolerance. These studies
focus more on minimizing mean-time-to-recovery (MTTR) than on software
debugging.
Feldman and Brown developed a system for program
debugging [22] that periodically checkpoints the memory
state of a process by keeping track of pages touched by the process.
They propose using this system for program restart and comprehensive
execution path logging. But their mechanism involves changes to the
compiler, loader, standard library and the kernel. It tracks all
memory accesses via code instrumentation and thereby this approach is
very heavy-weight. Further, they do not provide deterministic replay;
therefore, some errors may not manifest themselves during subsequent
re-execution.
Russinovich[59] suggests a lightweight approach to log
nondeterministic accesses to shared memory by merely replaying the
interleaved order of processes sharing the memory
deterministically. An application is instrumented to obtain
fine-grained software instruction counters and the OS has to record
the location of context switches. This technique can be potentially
used by FlashBack to support the replay of shared-memory
multi-processed program.
ReVirt[17] is a novel approach to intrusion analysis that
encapsulates applications within a virtual OS that itself runs as a
process in the guest OS. This technique decreases the size of the
trusted computing base (TCB) and allows precise logs to be maintained by
the guest OS. Flashback is significantly different from ReVirt. First,
debugging support needs to checkpoint application state on
timescales(minutes) that are several orders of magnitude smaller than in
ReVirt(days). Second, unlike ReVirt which has to contend with malicious
intruders by logging "everything", Flashback need only log changes that
are made by the application being debugged and external events that
affect its operation.
The constraints with existing system support for rollback motivate the
need for a new lightweight, fine-grained rollback and deterministic
replay solution specifically designed for software debugging.
3 Overview of Flashback
Flashback provides three basic primitives for debugging, Checkpoint(), Discard(x) and Replay(x).
- stateHandle = Checkpoint (): Upon this call, the system
captures the execution state at the current point. A state handle is
returned so that the program can later use it for rollback.
- Discard (stateHandle): Upon this call, the captured
execution state specified by stateHandle is discarded. The
program can no longer roll back to this state.
- Replay (stateHandle): Upon this call, the process is rolled
back to the previous execution state specified by stateHandle
and the execution is deterministically replayed until it reaches the
point where Replay() is called.
To provide the above primitives, Flashback uses shadow
processes to efficiently capture the in-memory execution state of a
process at the specified execution point. The main idea of shadow
process is to fork a new process at the specified execution point
and this new process maintains the copy of the process's execution
state in main memory. Once a shadow process is created, it is
suspended immediately. If rollback is requested, the system
kills the current active process and creates a new active process from
the shadow process that captured the specified execution state. Since
Flashback does not attempt to recover from system crashes or hardware
failure, there is no need to store the shadow process onto disk or
other persistent storage. This reduces the overhead of the checkpoint
process significantly. Moreover, copy-on-write is used to further
reduce the overhead.
While our method of checkpointing allows the in-memory state of a
process to be reinstated, the process may not see the same set of open
file descriptors or network connections during re-execution. Even if
the state of file descriptors can be reproduced, it is still a
cumbersome task to restore the contents of the file to the original
state, and to ensure that network connections will respond exactly as
in the original execution. Similarly, during replay it may be
undesirable to let the process affect the external environment again
by, say, deleting files or modifying their content.
In order to support deterministic replay of a rolled back process, we
adopt an approach wherein we record all interactions that the
executing process has with the environment. During replay, the logged
information is used to ensure that the re-execution appears
``identical'' to the original run. When a checkpoint is initiated
using the checkpoint primitive, in addition to capturing
in-memory execution state, the system also records the interactions
between the process and its environment. During replay, the
previously collected information is used to give the process the
impression that the external environment is responding exactly
as it did during the original execution, and that it is affecting the
environment in the same way.
Shadow processes can be used in conjunction with the deterministic
replay mechanism either within a debugging environment like gdb, or
through explicit calls made by the program being debugged:
- Interactive debugging: One possible usage scenario is
where the debugging platform can periodically capture the state of an
executing process by invoking checkpoint (similar to the
insertion of breakpoints in gdb, for instance). If an error occurs,
the programmer can then instruct the debugger to roll back execution
to a previously captured state by specifying the time of the earlier
checkpoint.
- Explicit checkpointing and rollback: An alternate usage
scenario is that the programmer takes control of when checkpoints are
taken in the code. Figure 1 shows an example of
a program where the programmer has inserted explicit invocations to
checkpoint, replay and discard primitives.
Automatic checkpoint/rollback support inside an interactive debugger
is convenient and requires no changes to the program source code. On
the other hand, giving the programmer explicit control on
checkpoints/rollbacks enables more intelligent and meaningful
checkpoint generation.
Figure 1:
Code for a process augmented with primitives
 |
Figure 1 shows a program in which the programmer
calls checkpoint in line 1. If the read operation in line 6
fails, the programmer can roll back to the execution state captured at
line 1. To help characterize the bug, the execution from line 1 to
line 6 can be replayed deterministically by attaching an interactive
debugger or switching to a profiling mode with extensive
instrumentation. If line 6 succeeds, the checkpoint is discarded.
4 Rollback Using Shadow Processes
Flashback creates checkpoints of a process by replicating the
in-memory representation of the process in the operating system. This
snapshot of a process, known as the shadow process, is
suspended immediately after creation and is stored within the process
structure. A shadow process represents the passive state of the
executing process at a previous point, and can be used to unwind the
execution of the process by replacing the new execution state with the
shadow state and commencing execution in the normal fashion. If a
shadow state is not needed anymore, the process can discard it.
The creation of a shadow process for a running process, an event we
refer to as state-capture, is achieved by creating a new shadow
process structure in the kernel, and initializing this structure with
the contents of the original process' structure. The state
information captured includes process memory (stack, heap), registers,
file descriptor tables, signal handlers and other in-memory state
associated with a process. A pointer to this shadow structure is then
stored in the original process' structure. The new representation of a
process with its shadow process is shown in figure 2.
The checkpoint, discard and replay calls are either automatically
generated by the debugging infrastructure at specific intervals, or
inserted by the programmer in the source code (as shown in the example
in the previous section). In case of a discard, the system discards
the specified shadow state. If a checkpoint is requested, the system
creates a new shadow of the current state and stores it. In the case
of a rollback, the process rolls back the execution state to the
previously generated shadow process. Figure 2
illustrates the effect of these primitives on the state of a
process.
Figure 2:
Effect of the primitives on the state of an executing process.
When checkpoint is invoked, the process makes a clone of its execution state.
Upon discard the shadow is removed; if a rollback occurs, the original
execution state is discarded.
 |
It is possible to maintain two or more shadow processes for an
executing process. Multiple shadow processes are useful for
progressive rollback and re-execution during
debugging [78]. In some cases, when an error
occurs, rolling back to only the most recent execution point before
replay may not be enough to catch the root of the bug because it could
have happened before this execution point. Therefore, it is necessary
to roll back further and deterministically restart from an earlier
execution point. It is also possible to roll back to the same shadow
multiple times and cause additional checkpoints to be taken during
replay.
To reduce overhead, shadow process state is maintained using
copy-on-write. In other words, state capture proceeds through the
creation of an in-memory copy-on-write map of the current state. When
a shadow process is created, the virtual memory of the process is
marked as read-only. A first write to any page by the active process
would trigger the creation of a copy of the old data. This
optimization has a couple of benefits. First, the time to create a
shadow is significantly reduced by eliminating the need t0 copy
possibly large amounts of memory state. Second, a shadow process
occupies little space(in memory). Third, multiple shadows created at
different execution points do not need to maintain duplicate copies of
the state. Finally, the significant overlap in memory pages between a
shadow process and the active process minimizes the impact on the
paging behavior of the process due to discard/replay of state.
However, writes onto copy-on-write protected memory during execution
of the main process does incur overhead. Fortunately, our experimental
results presented in Section 6 show that these
overheads are not significant.
Rollback of a multi-threaded process requires special attention. This
is because in a multi-threaded environment several components of the
process state are implicitly shared across all threads that belong to
the same process. For example, threads implemented using the pthread
package on Linux, share memory, file descriptors and signal handlers
with each other. The only thread-private states are user-space (and
kernel) stacks. Such implicit sharing vastly complicates rollback
because it is no longer possible for a thread to revert to pristine
versions of the shadow state without impacting the execution of other
threads.
There are two approaches to support fine-grained rollback of
multi-threaded programs. One is to capture the process state for the
entire process and roll back all threads to a previous execution
point. The second approach is to track thread dependencies such as
memory read-write and file read-write dependencies and roll back only
those threads that depend on the erroneous
thread [2,16,18,67,70].
Flashback uses the first approach to support rollback of
multi-threaded programs. In other words, the underlying system
captures the execution state of all threads of a process at a
checkpoint. Likewise, when a rollback occurs, Flashback re-instates
the execution state of all threads by reverting back to a pristine
copy of the shared state. This enables maintenance of consistent state
among all threads. Thread synchronization primitives, such as
acquiring/releasing locks and semaphore operations are also implicitly
rolled back.
Our approach has several advantages over the alternative for software
debugging, even though rolling back all the threads of a process when
only one of them encounters an error, may seem inefficient. First, our
approach is simpler because it does not require complicated logic to
keep track of thread dependencies. Tracking thread dependencies is
very difficult because concurrent accesses to shared
memory are not handled through software or some specialized cache
coherence controller. Tracking dependencies requires either hardware
support or instrumentation of application binary code to notify the
operating system about data sharing. The logic to track dependencies
adds overheads to the error-free execution and is also
error-prone. Second, to characterize thread synchronization or
data races, it might be more informative to roll back all
threads and deterministically re-execute all threads step-by-step
interactively. Furthermore, the inefficiency of rolling back all
threads is encountered only when faults occur - the less common case,
while dependency tracking, if done dynamically would lead to overhead
on the common case.
3 Implementation in Linux
We have modified the Linux 2.4.22 kernel by adding three new
system calls - checkpoint(), discard() and replay()
to support rollback and replay. The kernel handles these functions as
described earlier. The overhead of these system calls on normal process
execution is an important consideration in our implementation.
To capture shadow state, we create a new process control block (task_struct in Linux terminology) and initialize it with a copy of the
calling process's own structure. This copy involves creation of
copy-on-write maps over the entire process memory via the creation of
new mm_struct, file_struct and signal_struct.
The register contents of the current execution context when it was last
in user-space are copied onto the new control block and finally the
kernel stack of the new control block is initialized by hand such that
the shadow process, when executed, continues execution by returning from
the checkpoint system call with a different return value.
The state capture procedure is different from the fork operation in
several ways. The primary difference is that after a fork operation,
the newly created process is visible to the rest of the system. For
instance, the module count is incremented to reflect the fact that the
child process is also sharing the same modules. The newly created
process is added to the scheduler's run lists and is ready to be
scheduled. In contrast, a shadow process is created only for
maintaining state. It is not visible to the rest of the system and
does not participate in scheduling.
After capturing a shadow state, the calling process returns from the
system call and continues execution as normal, with the shadow image
in tow. Any changes made to the state after the checkpoint leave the
shadow image in its pristine state.
A call to the discard() system call deletes a process's shadow
image and releases all resources held by it. The replay() system
call, on the other hand, drops the resources of the current image, and
overwrites the process control block with the previously captured
shadow image. Since the memory map of the current process changes
during the call, the page tables corresponding to the new mm_struct are loaded by a call to switch_mm.
A subtle result of reinstating the shadow image is that the replay() system call never returns to the caller. As soon as the
shadow becomes active for the caller, the return address for the
replay() call is lost (it was part of the speculative state),
being replaced instead with the return address of the checkpoint()
call that corresponds to the state that the process is rolling back
to.
When we implemented rollback support for multi-threaded programs in
Linux, we encountered many challenges because of the design of Linux
thread package that our implementation is based on: pthreads. In this
thread package, there is a one-to-one mapping between user-space and
kernel-space threads, i.e. each user-space thread has an executable
process counterpart inside the kernel. State sharing is achieved by
using the clone system call to create lightweight processes
that share access to memory, file descriptors and signal handlers
among other things. POSIX compliance, with respect to delivery of
signals (and other requisites), is ensured by creating an LWP thread
manager that is the parent of all the threads (LWP's) associated with
a process. While the one-to-one mapping allows the thread library to
completely ignore the issue of scheduling between threads at
user-space, it presents several complications for rollback.
Recall that when one thread attempts to process a checkpoint event, we
need to capture the state of all the other threads of that process.
Since every user-space thread is mapped to a kernel thread, the other
threads may be executing system calls or could be blocked inside the
kernel waiting for asynchronous events (sleep- SIGALRM, disk IO etc.).
Capturing the transient state of such threads could easily lead to
state inconsistency upon rollbacks, such as rolling back to a sleeping state when the corresponding kernel timer has already
expired. It is difficult to capture the state of an
execution context from within a different execution context.
We are currently exploring a solution to this problem by explicitly
identifying such troublesome scenarios and manipulating the user-space
and kernel stacks to ensure that the interrupted system call is
re-executed upon rollback. Specifically, threads that are blocked in
system calls are checkpointed as if they are about to begin
execution of this interrupted system call.
Notice that apparently simple solutions that circumvent this problem
such as using inter-process communication or explicit barrier
synchronization prior to state capture are not applicable. In the
former case, IPC mechanisms such as signals and pipes increase the
latency of the state capture event because their processing is usually
deferred, and is often not deterministic. Barrier synchronization on the
other hand, would cause the processing of a state capture event to be
delayed until the event is generated on all the threads of a process,
which might be unrealistic in certain applications.
5 Replay Using Record-and-Sandbox
In order to deterministically replay the execution of a process from a
previous execution state, we need to ensure during re-execution that
the process perceives no difference in its interaction with the
environment. For instance, if the process did a read on a file
and received a particular array of bytes, during replay, the process
should receive the same array of bytes and return value as before,
though the file's contents may have already been changed.
Flashback does not ensure exactly the same execution during replay as
during the original run. Instead, Flashback provides only an impression
to the debugged process that the execution and interaction with the
environment appears identical to those during the original run. It is
difficult to provide the exact same execution because the external
environment, such as network connections or device states, etc, is
beyond the control of the operating system. As long as Flashback
interacts with the debugged process in the same way, with very high
probability, the bug can be reproduced during replay.
A process in Flashback can operate in one of two modes - log and
replay. In the log mode the system logs all interactions
of the process with the environment. These interactions can happen
through system call invocations, memory-mapping, shared memory in
multi-threaded processes, and signals. The process enters the log mode
when the checkpoint primitive is invoked. In the replay mode,
the kernel handles system interactions of the process by calling
functions that simulate the effect of the original system call
invocation. The replay mode is selected when the replay
primitive is invoked. In this mode, Flashback ensures the interaction
between the replayed process and the OS is the same as was logged
during the original run.
Logging and replay are different for different types of system calls:
- Filesystem-related - Calls such as open, close, read, write, seek
- Virtual memory-related, such as memory allocation, mmap etc.
- Network-related - such as socket creation, polling, send, recv etc.
- Process control - such as exec, fork, exit, wait
- Interprocess communication-related - such as creation and manipulation of message queues and named pipes
- Utility functions - such as getting the time of day
When simulating the effect of a system call, Flashback has to ensure
that the values returned by the system call are identical to those
returned during the original execution. In addition, the original
system call may return some ``hidden'' values by modifying memory
regions pointed to by pointer arguments. For example, the read()
system call loads the data from the file system into the buffer
specified by one of the parameters. These side effects also need to
be captured by Flashback. A faithful replay of a system call thus
requires Flashback to log all return values as well as
side-effects. While somewhat tedious because of the special attention
required by each system call to handling its specific arguments, this
support can easily be provided for a large body of system calls.
In Flashback, we intercept system calls invoked by a process during
its execution. In order to do this, we replace the default handler for
each system call with a function that does the actual logging and
replay as shown in figure 3. In logging mode, the
function invokes the original call and then logs the return values as
well as the side-effects. In replay mode, the function checks to
confirm that the same call is being made again, and then makes the
same side-effects and returns the logged return value.
Figure 3:
Hijacking System Calls for Logging and Replay in Flashback
 |
A notable exception to bypassing the actual system calls during replay
is for calls related to memory management, such as memory mapping and
heap management. In this situation we cannot fake memory allocation
- if the process accesses a memory location that we have faked the
allocation of, then it will result in a segmentation fault. This
problem arises because while memory is allocated and deallocated using
the brk() system call, it may be accessed through direct
variable assignments. The changes made to memory locations do not make
any permanent changes to the system; i.e. the state is captured by a
process' checkpoint exclusively. As we discuss shortly, however, this
may not be the case for files that have been mapped into memory.
Once system calls have been handled, much of the process' original
execution can be replayed. For instance, the process being replayed
can read data from files as it did before even though these files may
actually have been modified or may not even exist in the system
anymore. Similarly, it will receive network packets as it originally
did from remote machines. As far as the process is concerned, it
believes that these events are happening as they did before in terms
of both actual data exchanged and the relative timing of asynchronous
events.
Linux supports two different flavors of shared memory for interprocess
communication - System V IPC and BSD mmap. These implementations allow
processes to share a single chunk of memory by mapping the shared memory
onto their respective memory spaces. BSD mmap allows processes to map a
previously opened file into a region of its memory, after which it can
access the file using simple memory assignment instructions. When a
shared segment is requested, the kernel forces the memory management
unit (MMU) to generate a page fault every time a previously unused
section of this memory region is accessed. In response to the page
fault, the kernel loads one page of data from the file and reads it into
the process' memory.
A file may be mapped as either private or shared. Any
changes made to privately mapped files are visible only to that process
and do not result in changes to the file. On the other hand, files that
are mapped as shared may be modified when the process writes to the
memory area. Further, for shared files, changes made to the file by a
processes will be immediately visible to other processes that have
mapped the same region of the file. Providing replay for shared memory
poses problems as a process can access shared memory without making any
system calls, making it harder to track changes to the shared memory and
fake them later.
One simple solution for handling memory-mapped files is to make copies
of pages that are returned upon the first page fault to a memory region
mapped to a file. During replay of requests to create memory maps, the
memory areas are mapped to dummy files, and page faults are handled by
returning saved copies of pages. Due to the lazy demand-paging approach
used by Linux, only those pages that are accessed during execution need
to be copied, thus drastically reducing the overhead. This approach will
not work when the same region of the file is mapped as a shared region
by multiple processes, each of which make changes to the region. This
approach works for files that have been mapped as private, as well as
shared mappings where all changes to the file are made by the process
being debugged.
Handling shared file-mappings with multiple processes writing to the
file is a more complicated problem, and requires the kernel to force a
page fault for every access to the shared region by the process being
replayed instead of just the first access as in the earlier case. A
possible enhancement to the logging solution would be to set the access
rights of a given page to the last process to access it, and thus only
fault when another process has accessed the page since this one. This
way, several successive reads or updates will only suffer one costly
exception instead of many. During replay, however, it would still be
required to fault for each access since the other processes might not be
around any more to make their changes.
In Flashback, currently, we have implemented the simple solution
described earlier. In spite of the enhancement proposed for shared
file-maps with multiple writers, we believe that an efficient solution
to address this challenge will require support from the underlying
architecture. Shared memory can be dealt with using similar
mechanisms.
While the techniques outlined above work for applications with a
single thread of control, replaying multi-threaded applications poses
additional challenges. Logging changes made by a multithreaded
application involves logging the changes of each thread of the
debugged process. During replay, the interleaving of shared memory
accesses and events has to be consistent with the original sequence.
Ensuring that the multiple threads are scheduled in the same relative
order during replay is another issue. For multi-threaded applications
running on a single processor system, we propose adopting the approach
described in [13] for deterministic replay. The basic idea is
to record information about the scheduling of the threads during the
original execution and use this information during replay to force the
same interleaving between thread executions. Since this implementation
would also be in the kernel, the physical thread schedule is transparent
and can be used in lieu of the logical thread schedule information
proposed by [13]. We will implement this in the future in the
tool, possibly with the support of architecture-level mechanisms
such as those described in [55].
Signals are used to notify a process about a specific event, or to
force the process to execute a special handling code when an
event is detected during its execution. Signals may be sent to a
process either by another process or by the kernel itself. Signals are
asynchronous and are delivered proactively to a process by the kernel.
They may be delivered at any time to a process. Signals present a
challenge for deterministic replay because signals are asynchronous
events that affect the execution of a process. The replaying mechanism
has to ensure that signals are delivered at exactly the same points
during re-execution as in the original execution.
Deterministic reproduction of signals may be handled using the approach
proposed by Slye and Elnozahy [66], though Flashback does not
currently support signal replay. The mechanism outlined in their work
makes use of an instruction counter to record the time between
asynchronous events. The instruction counter is included in most modern
processor systems today. When a signal occurs, the system creates a log
entry for it, which includes the value of the instruction counter since
the last system call invocation. During replay, Flashback checks to see
if the next log entry corresponds to a signal. If so, then it
initializes the instruction counter with the time from the current
system call till the signal. When a trap is generated because of
timeout, the kernel delivers the signal to the process.
We have implemented a prototype of Flashback's replay mechanism in
Linux-2.4.22. The prototype handles replay of system calls as well as
memory-mapped files to a limited extent. In Linux, a user-space process
invokes a system call by loading the system call number into the eax register and optional arguments in other registers, and then
raising a programmed exception with vector 128. The handler for this
exception, the system call handler, does several checks and then runs
the function indexed in the sys_call_table array by the
system call number. It finally returns the results got from this
action to the user process.
We used syscalltrack [71], an open-source tool
that allows system calls to be intercepted for various purposes such
as logging and blocking. The core of the tool has been implemented in
a kernel module which ``hijacks'' the system call table by replacing
the default handlers for some system calls with special
functions. System call invocations can be filtered based on several
criteria such as the process id of the invoking process as well as
values for specific arguments. System calls that need to be logged
are handled in a number of ways. At one extreme, the special function
may log the invocation of the system call and let the call go through
to the original handler, while at the other it may block the system
call invocation and return a failure to the user process. The actual
behavior of the special function is controlled using rules that may be
loaded into the kernel.
In our implementation, we added a new action type that the special
function can perform, namely the AT_REPLAY action for replaying.
This action verifies that the system call invocation matches a call that
the process originally made, then sets the return value according to the
logged invocation and also makes the same side effects on the arguments
as before. By doing this, it bypasses the actual system call handler for
some system calls and overrides its behavior with that of the simulating
function. For other system calls such as the brk call, Flashback
allows the system calls to be handled by the original system call
handler since memory allocations need to be made even during replay.
6 Evaluation
We evaluate our prototype implementation of Flashback using
microbenchmarks as well as real applications. The timing data we
present were obtained on a 1.8GHz Pentium IV machine with 512KB of L2
cache and 512MB of RAM.
Figure 4:
Microbenchmark Results for Shadow Process Creation at different sizes of process data memory
 |
To perform a very basic performance evaluation of the rollback
capabilities, we instrumented the checkpoint(), discard()
and replay() system calls. We then ran a small program that
repeatedly invokes checkpoint(), does some simple updates and
then either discards the checkpoint by calling discard() or
rolling back by calling replay().
Figure 4(a) presents the time for the three
basic operations: checkpoint, discard and replay. A checkpoint takes
around 25-1600 s as the amount of state updates between two
consecutive checkpoints varied from 4KB to 400MB. Since creation of a
shadow process involves creation of a copy-on-write map, the cost is
proportional to the size of the memory occupied by the process.
Similarly, the cost to discard or replay a shadow is proportional to
the size of memory modified by the process. s as the amount of state updates between two
consecutive checkpoints varied from 4KB to 400MB. Since creation of a
shadow process involves creation of a copy-on-write map, the cost is
proportional to the size of the memory occupied by the process.
Similarly, the cost to discard or replay a shadow is proportional to
the size of memory modified by the process.
The costs of discard (replay) are also directly proportional to the
number of pages in the corresponding checkpointed state (the current
state). This is because both discard and replay involve deletion of
one copy-on-write map. Our results show that discard and replay take
around 28-2800s when the entire memory is read, and between
28-7500s when the entire data memory is written. The higher
costs in the latter case are because the kernel has to return a large
number of page frames to its free memory list when the shadow state is
dropped/reinstated. Typical applications will of course not modify
all pages in their address space between checkpoints, and so the costs
of the discard and replay operations will be closer to the lower end
of the range shown in Figure 4(b).
An important objective of our rollback infrastructure is to have
minimal impact on normal application performance. We therefore
consider the data for checkpoint() and discard() more
important than that for replay(). This is because the latter is
invoked only when errors occur, and will therefore not be part of
common-case behavior. Regardless, the overhead imposed by the
rollback call is as low as that for shadow state release. This is
promising since it indicates we can restore execution state as fast as
common case checkpoint discard.
Figure 5:
Response time overhead (microseconds) for varying number of system call invocations
 |
Figure 6:
Response time overhead (microseconds) for varying sizes of memory logging
 |
In order to evaluate the logging overhead, we wrote a simple test
program that employs two threads in order to isolate the impact of the
logging overhead. In the program, the parent thread forks and creates
a child. It then loads the rules for logging into the framework and
notifies the child to begin invoking system calls. The rules allow the
kernel to filter system call invocations based on the process ID of
the child.
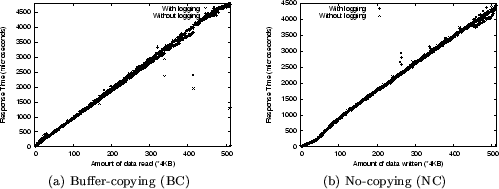
While logging system calls that have side effects on memory regions, such
as read, stat and getsockopt, Flashback also needs to
record the contents of the buffer or structure. Thus, with regard to
logging overhead, there are two groups of system calls, those that cause
side effects on some memory regions, and those that simply return a
value after performing the intended action. We refer to the first class
of system calls as buffer-copying (BC) and the second group as
no-copying (NC). For NC system calls, there is no need to record the
contents of buffers; just the system call ID and the return values will
suffice.
To study the overhead on every system call due to hijacking and logging,
we invoked the read and write system calls several times, gradually
increasing the number of invocations. In each invocation, the number of
bytes read or written is 4 KB. For each run, we start with a clean
file cache in order to make the effect of caching on system call
overheads consistent. Figures 5 shows the
overhead imposed by the sandbox mechanism. The overhead due to
sandboxing occurs because of the extra indirection of system calls
imposed by Flashback. Instead of being handled directly by the system
call handlers, system call requests need to pass through filters and the
logging mechanism. The increase in overhead is linear with the number of
system calls for both the system calls. The difference in slope between
the two lines on the graphs represents the extra per-system-call
overhead imposed due to logging. This is around 30 microseconds on an
average.
To evaluate the effect that the copying of buffers has on the logging
overheads, we invoked the read and write system calls repeatedly,
gradually increasing the number of bytes read or written from 4 KB to 2
MB. The actual number of system calls is small in this case.
Figure 6 shows the overhead while varying the
amount of data read or written. The overhead for BC and NC system calls
is comparable, and the extra copying of buffers does not appear to
impose any extra overhead. This is because the contents of the log are
buffered, and written to disk asynchronously. In these experiments, the
disk cache was warmed since all the data for the files was prefetched
before the actual execution. The values therefore reflect reads and
writes entirely involving the cache only.
Figure 7:
Size of the log file (KB) for varying number of system call invocations
 |
Figure 7 shows the space overhead
because of logging BC and NC calls. As expected, the growth in the
size of the log file is linear in terms of the number of system calls,
though the slope is greater for BC since more data is written each
time.
In order to test our implementation of state-capture in a realistic
environment, we measure the performance with the well-known
Apache web-server. We evaluate the system overhead for both
multiprocess version and multithread version of Apache. Our evaluation
serves to demonstrate two things: first, that fine-grained rollback
support is possible, and can be applied to real applications; and
second, that the performance impact on common-case execution is minimal.
In all the experiments reported herein, the web server is
bottle-necked by the network and is serving data at full network
throughput of 100Mbps. We use these experiments to show that
off-the-shelf machines(1.8MHz, 512MB RAM) have enough spare cpu cycles
to provide fine-grained rollback without affecting client's perceived
performance. The server is checkpointed multiple times (typically
thrice) during the processing of each request. We essentially create
a checkpoint just before reading the HTTP request off a newly accepted
socket, before processing a valid HTTP request from an existing
connection and before writing out the HTTP response onto the
socket. Thus, at any point of time, Flashback maintains as many shadow
images as the total number of requests being processed by the server.
All data points in this section have been averaged over three runs.
Figure 8:
Throughput and response time with Multiprocess
Apache web-server. Baseline corresponds to the case running in
the default Linux system without rollback support, and With
rollback support corresponds to the Linux kernel modified to include
rollback support. The results shown in these figures indicate that
throughput and response time are not affected by Flashback. These times
reflect state-capture overhead
 |
Figure 9:
Throughput and response time with multithread Apache
web-server. The results shown in these figures indicate that
throughput and response time are not affected by Flashback. These times
reflect state-capture overhead
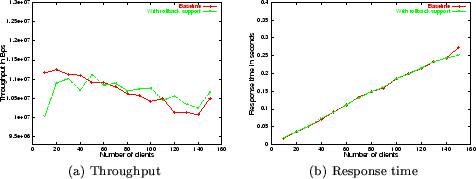 |
Figure 10:
One-minute CPU load averages for the host on which the Apache
web-server is running. The curves demonstrate the extra work being
performed by the kernel when checkpointing is enabled.
 |
The Apache server can be configured to run in a multiprocess or
multithread mode. In the former, Apache maintains a pool of worker
processes to service requests. Each worker process is a single thread
and the number of workers in the pool is adapted dynamically based on
load estimates. However, in the latter, Apache uses a much smaller
pool of worker processes, with each worker process consisting of
multiple threads implemented by the pthread package. We
present here performance figures for both configurations of the Apache
server. In this experiment, the web server checkpoints its state upon
the arrival of request for a page, processes the request, and discards
the checkpoint. These results reflect the overhead of capturing state.
Since Flashback currently does not support replay of multithreaded
execution and shared memory, we disabled logging for replay during these
experiments.
To exercise the web server, we use an http request-generating
client application, WebStone [73], which sends
back-to-back requests to a single web server. Each request constitutes
a fetch of a single file, randomly selected from a pre-defined
``working set''. The working set comprised files of sizes varying
between 5KB and 5MB, but the majority of requests constituted a fetch
of 5KB. The request generating application forks a pre-defined number
of client processes, each of which submits a series of random requests
to the web server. The server was run on a off-the-shelf 1.8GHz
Pentium IV machine, connected to the client via a 100Mbps LAN. Performance was measured
in terms of throughput, aggregate response time and load on the server
CPU. In all the experiments reported here, the server was operating at
the full network throughput of 100Mbps.
We compare the Apache web-server on the prototype system with a
baseline system running the original version of Linux.
Figure 8 shows throughput and response time in
Flashback and the baseline system with Apache running in multiprocess
mode. It is clear from the graphs that there is no significant
difference between the client-perceived throughput and response time.
When the number of clients is small, Flashback has 10% lower
throughput, even though the average response time is the same as the
baseline system. However, when the number of clients increases, the
difference between baseline and Flashback disappears. In some cases,
Flashback performs even better than the baseline system. We consider
these small differences well within expected experimental variance,
and conclude that the impact of rollback support on Apache performance
is negligible.
Figure 9 shows the results for the multithread
version of Apache. As expected, the overheads imposed by Flashback on
multithreaded execution are slightly lower than those for the
multiprocess version, evidenced by the throughput figures which more
closely match one another in most cases. This lower overhead is a
direct result of fewer effective system calls, because when one thread
undergoes a capture event, the state of all the other threads is
automatically captured. Subsequent capture-events on the other
threads of this process are treated as nops during the lifetime
of this shadow process. Hence the number of capture events necessary
are much fewer.
Although client-perceived system performance remains almost
unaffected, the kernel does perform extra work each time a checkpoint
is initiated. Of course, this does not come for free. To quantify the
cost, we monitored CPU load average on the machine hosting the
webserver. The metric we use measures the average number of processes
waiting on the run queue over the last minute, which is an estimate of
system load as it statistically captures the amount of time each
process spends on the run queue. Figure 10 plots
these results for the multiprocess and multithread versions. The
graphs expose the overhead in capturing shadow state, which in our
evaluation occurs very frequently (once every request received by the
server). Note that even though the cpu utilization of the server
increases by 2-4 times, the client perceived performance, in both data
bytes delivered and time to respond, remains unchanged. We assert that
the experimental setup is realistic as modern web-servers are often
constrained by network bandwidth and have spare cpu cycles.
In both the multiprocess and multithread configurations, CPU load
increases significantly. In the single-threaded case, the extra load is
quite high. This is because a multiprocess Apache webserver uses a
collection of separate Unix processes to handle web requests, each of
which now captures shadow state when handling a request. In the
multithreaded version, the state-capture event occurs once for all
threads of execution, because we capture the state of all threads,
en masse, each time a checkpoint is taken. The smaller number
of system calls, and the smaller size of the state captured (per worker
thread), together contribute to the multithread configuration exhibiting
better CPU load than the multiprocess configuration.
7 Using Flashback in gdb
Using Flashback, it is fairly straightforward to incorporate
support for checkpointing, rollback and deterministic replay into a
debugging utility such as gdb.
We have modified gdb to support three new commands - checkpoint,
rollback, and discard, for creating checkpoints, to support rollback
and deterministic replay of debugged programs. Programmers can set up
breakpoints at places where they might want to create checkpoints. At
these breakpoints, after seeing the state of the program, they can
choose to create a new checkpoint by using the checkpoint command.
They can also discard earlier checkpoints, thereby freeing system
resources associated with those checkpoints by using the discard
command. If they find the system state to be inconsistent, they can
roll back to an earlier checkpoint by using the rollback command.
Using Flashback, gdb can be made to automatically take periodic
checkpoints of the state of the process being executing. New commands
are added into the debugger user interface to allow programmers to
enable or disable automatic checkpointing during execution of the
debugged program. Programmers also have control over the frequency of
checkpointing. This frees the programmer from having to insert
breakpoints at appropriate locations in the code and explicitly taking
checkpoints.
In order to incorporate checkpoints into gdb, we made changes to the
target system handling component and the user interface
components. The target system handling component handles the basic
operations dealing with the actual execution control of the program,
stack frame analysis and physical target manipulation. This component
handles software breakpoint requests by replacing a program execution
with a trap. During execution, the trap causes an exception which gives
control to gdb. The user can choose to take a checkpoint at this time.
gdb does this by making a checkpoint system call
passing the process ID of the process being debugged. Similarly, for
rollback and replay, gdb uses the rollback and replay system calls respectively.
For automatic checkpointing, in addition to these changes, gdb
maintains a timer that keeps track of time since the last
checkpoint. The timeout for the timer can be set by the user. When a
timeout occurs, gdb checkpoints the process.
8 Conclusions and Future Work
In this paper we presented a lightweight OS extension called Flashback
to support fine-grained rollback and deterministic replay for the
purpose of software debugging. Flashback uses shadow process to
efficiently capture in-memory states of a process at different execution
points. To support deterministic reply, Flashback logs all interactions
of the debugged program with the execution environment. Results from our
prototype implementation on real systems show that our approach has
small overheads and can roll back programs quickly.
Besides software debugging, our system can also be used to improve
software availability by progressively rolling back and re-executing to
avoid transient errors [78]. In addition, our
approach can be extended to provide lightweight transaction models that
require only atomicity but not persistence.
We are in the process of combining Flashback with hardware architecture
support for rollback and deterministic replay [56] to further
reduce overhead. We are also evaluating Flashback with more
applications. Flashback currently only works for programs that run on a
single machine. We are exploring ways to extend it to support
distributed client-server applications by combining with techniques
surveyed by Elnozahy et al. [18].
Flashback including the patches to both Linux and gdb will be released
to the open source community so that other researchers/developers can
take advantage of Flashback in interactive debugging.
We would like to thank Dr Srinivasan Seshan, the shepard for the paper, for
useful suggestions and comments. We also thank the anonymous reviewers for
useful feedback, and the Opera group for useful discussions, and
Jagadeesan Sundaresan, Pierre Salverda and Arijit Ghosh for their
contribution to the project.
- 1
-
S. V. Adve, M. D. Hill, B. P. Miller, and R. H. B. Netzer.
Detecting Data Races on Weak Memory Systems.
In Proceedings of the 18th Annual International Symposium on
Computer Architecture, pages 234-243, 1991.
- 2
-
Alvisi and Marzullo.
Trade-offs in implementing causal message logging protocols.
In PODC: 15th ACM SIGACT-SIGOPS Symposium on Principles
of Distributed Computing, 1996.
- 3
-
C. Amza, A. Cox, and W. Zwaenepoel.
Data replication strategies for fault tolerance and availability on
commodity clusters.
Proc. of the International Conference on Dependable Systems and
Networks., 2000.
- 4
-
A. Bobbio and M. Sereno.
Fine grained software rejuvenation models.
In IEEE International Computer Performance and Dependability
Symposium, 1998.
- 5
-
A. Borg, J. Baumbach, and S. Glazer.
A message system supporting fault tolerance.
In Proceedings of the 9th ACM Symposium on Operating Systems
Principles (SOSP), volume 17, pages 90-99, 1983.
- 6
-
A. Borg, W. Blau, W. Graetsch, F. Herrmann, and W. Oberle.
Fault tolerance under UNIX.
ACM Transactions on Computer Systems, 7(1):1-24, Feb. 1989.
- 7
-
C. Boyapati, R. Lee, and M. Rinard.
Ownership types for safe programming: Preventing data races and
deadlocks.
In Object-Oriented Programming, Systems, Languages, and
Applications (OOPSLA), November 2002.
- 8
-
G. Candea and A. Fox.
Crashonly software.
In Proceedings of the 9th Workshop on Hot Topics in Operating
Systems, May 2003.
- 9
-
M. Castro and B. Liskov.
Proactive recovery in a byzantine-fault-tolerant system.
In OSDI, 2000.
- 10
-
P. M. Chen, D. E. Lowell, and G. W. Dunlap.
Discount checking: Transparent, low-overhead recovery for general
applications.
Technical report, University of Michigan, Department of Electrical
Engineering and Computer Science, July 1998.
- 11
-
P. M. Chen, W. T. Ng, S. Chandra, C. Aycock, G. Rajamani, and D. Lowell.
The Rio file cache: Surviving operating systems crashes.
In Seventh International Conference on Architectural Support for
Programming Languages and Operating Systems, pages 74-83, Cambridge,
Massachusetts, 1-5 Oct. 1996. ACM Press.
- 12
-
Y. Chen, J. S. Plank, and K. Li.
Clip: a checkpointing tool for message-passing parallel programs.
In Proceedings of the 1997 ACM/IEEE conference on Supercomputing
(CDROM), pages 1-11. ACM Press, 1997.
- 13
-
J. Choi and H. Srinivasan.
Deterministic replay of java multithreaded applications.
In Proceedings of the SIGMETRICS Symposium on Parallel and
Distributed Tools, pages 48-59, Aug. 1998.
- 14
-
J.-D. Choi and S. L. Min.
Race Frontier: Reproducing Data Races in Parallel-Program
Debugging.
In Proceedings of the Third ACM SIGPLAN Symposium on Principles
& Practice of Parallel Programming, pages 145-154, 1991.
- 15
-
K. D. Cooper, M. W. Hall, R. T. Hood, K. Kennedy, K. S. McKinley, J. M.
Mellor-Crummey, L. Torczon, and S. K. Warren.
The ParaScope Parallel Programming Environment.
Proceedings of the IEEE, 81(2):244-263, 1993.
- 16
-
O. P. Damani and V. K. Garg.
How to recover efficiently and asynchronously when optimism fails.
In International Conference on Distributed Computing Systems,
pages 108-115, 1996.
- 17
-
G. W. Dunlap, S. T. Kind, S. Cinar, M. A. Basrai, and P. M. Chen.
Revirt: enabling intrusion analysis through virtual-machine logging
and replay.
ACM SIGOPS Operating Systems Review, 35(SI):211-224, 2002.
- 18
-
E. N. M. Elnozahy, L. Alvisi, Y. Wang, and D. B. Johnson.
A survey of rollback-recovery protocols in message-passing systems.
ACM Computing Surveys (CSUR), 34(3):375-408, 2002.
- 19
-
D. R. Engler, D. Y. Chen, and A. Chou.
Bugs as inconsistent behavior: A general approach to inferring errors
in systems code.
In Symposium on Operating Systems Principles, pages 57-72,
2001.
- 20
-
D. Evans, J. Guttag, J. Horning, and Y. M. Tan.
Lclint: A tool for using specifications to check code.
In Symposium on the Foundations of Software Engineering,
December 1994.
- 21
-
D. Evans and D. Larochelle.
Improving security using extensible lightweight static analysis.
IEEE Software, 19(1):42-51, 2002.
- 22
-
S. Feldman and C. Brown.
Igor: A system for program debugging via reversible execution.
ACM SIGPLAN Notices, Workshop on Parallel and Distributed
Debugging, 24(1):112-123, Jan. 1989.
- 23
-
C. Flanagan and S. N. Freund.
Type-based race detection for Java.
ACM SIGPLAN Notices, 35(5):219-232, 2000.
- 24
-
C. Flanagan, K. Leino, M. Lillibridge, C. Nelson, J. Saxe, and R. Stata.
Extended static checking for java.
In PLDI, 2002.
- 25
-
G. Candea et. al.
Reducing recovery time in a small recursively restartable system.
In DSN, 2002.
- 26
-
K. Gharachorloo and P. B. gibbons.
Detecting Violations of Sequential Consistency.
In Proceedings of the Third Annual ACM Symposium on Parallel
Algorithms and Architectures, pages 316-326, 1991.
- 27
-
S. Hallem, B. Chelf, Y. Xie, and D. Engler.
A system and language for building system-specific, static analyses.
In Proceeding of the ACM SIGPLAN 2002 Conference on Programming
language design and implementation (PLDI), 2002.
- 28
-
S. Hangal and M. S. Lam.
Tracking down software bugs using automatic anomaly detection.
In Proc. 2002 Int. Conf. Software Engineering, pages 291-301,
Orlando, FL, May 2002.
- 29
-
R. Haskin, Y. Malachi, and G. Chan.
Recovery management in quicksilver.
ACM Transactions on Computer Systems (TOCS), 6(1):82-108,
1988.
- 30
-
R. Hastings and B. Joyce.
Purify: Fast detection of memory leaks and access errors.
In the Winter USENIX, 1992.
- 31
-
K. Havelund and T. Pressburger.
Model checking java programs using java pathfinder, 1998.
- 32
-
Y. Huang, C. Kintala, N. Kolettis, and N. Fulton.
Software rejuvenation: analysis, module and applications.
In FTCS-25, 1995.
- 33
-
Y. Huang and Y. Wang.
Why optimistic message logging has not been used in telecommunication
systems.
In Proceedings of the 1995 International Symposium on
Fault-Tolerant Computing (FTCS), pages 459-463, june 1995.
- 34
-
D. Johnson and W. Zwaenepoel.
Recovery in distributed systems using optimistic message logging and
checkpointing.
In Proceedings of the Seventh Annual ACM Symposium on Principles
of Distributed Computing, pages 171-181, Aug. 1988.
- 35
-
KAI-Intel Corporation.
Assure.
URL: http: //developer.intel.com/software/products/assure/.
- 36
-
S. Kumar and K. Li.
Using model checking to debug network interface firmware.
In the Fifth Symposium on Operating Systems Design and
Implementation (OSDI), 2002.
- 37
-
K. Li, J. Naughton, and J. Plank.
Concurrent real-time checkpoint for parallel programs.
In Second ACM SIGPLAN Symposium on Principles and Practice of
Parallel Programming, pages 79-88, Seattle, Washington, Mar. 1990.
- 38
-
K. Li, J. Naughton, and J. Plank.
An efficient checkpointing method for multicomputers with wormhole
routing.
International Journal of Parallel Programming, 20(3):159-180,
June 1991.
- 39
-
K. Li, J. Naughton, and J. Plank.
Low-latency concurrent checkpoint for parallel programs.
IEEE Transactions on Parallel and Distributed Computing, 1994.
- 40
-
B. Liskov.
Distributed programming in argus.
Communications of the ACM, 31(3):300-312, March 1988.
- 41
-
A. Loginov, S. H. Yong, S. Horwitz, and T. W. Reps.
Debugging via run-time type checking.
In Fundamental Approaches to Software Engineering, pages
217-232, 2001.
- 42
-
D. E. Lowell, S. Chandra, and P. M. Chen.
Exploring failure transparency and limits of generic recovery.
In OSDI, 2000.
- 43
-
D. E. Lowell and P. M. Chen.
Free transactions with Rio Vista.
In Proceedings of the 16th Symposium on Operating Systems
Principles (SOSP-97), volume 31,5 of Operating Systems Review, pages
92-101, New York, Oct.5-8 1997. ACM Press.
- 44
-
M. Luján, J. R. Gurd, T. L. Freeman, and J. Miguel.
Elimination of Java array bounds checks in the presence of
indirection.
In Proceedings of the Joint ACM Java Grande-Iscope Conference,
pages 76-85, 2002.
- 45
-
E. Marcus and H. Stern.
Blueprints for high availablity.
John Willey and Sons, 2000.
- 46
-
J. M. Mellor-Crummey and M. L. Scott.
Synchronization without contention.
In Proceedings of The 4th International Conference on
Architectural Support for Programming Languages and Operating Systems, pages
269-278, Apr. 1991.
- 47
-
S. L. Min and J.-D. Choi.
An Efficient Cache-based Access Anomaly Detection Scheme.
In Proceedings of the Fourth International Conference on
Architectural Support for Programming Languages and Operating Systems, pages
235-244, 1991.
- 48
-
National Institute of Standards and Technlogy (NIST), Department of Commerce.
Software errors cost u.s. economy $59.5 billion annually.
NIST News Release 2002-10, 2002.
- 49
-
G. C. Necula, S. McPeak, and W. Weimer.
CCured: type-safe retrofitting of legacy code.
In Symposium on Principles of Programming Languages, pages
128-139, 2002.
- 50
-
R. H. B. Netzer.
Optimal tracing and replay for debugging shared-memory parallel
programs.
In PADD, 1993.
- 51
-
J. Oplinger and M. S. Lam.
Enhancing software reliability with speculative threads, October
2002.
- 52
-
D. A. Patterson and et. al.
Recovery-oriented computing (roc): Motivation, definition,
techniques, and case studies.
UC Berkeley CS Tech. Report,UCB//CSD-02-1175, 2002.
- 53
-
D. Perkovic and P. J. Keleher.
A Protocol-Centric Approach to on-the-Fly Race Detection.
IEEE Transactions on Parallel and Distributed Systems,
11(10):1058-1072, 2000.
- 54
-
J. S. Plank, K. Li, and M. A. Puening.
Diskless checkpointing.
IEEE Transactions on Parallel and Distributed Systems,
9(10):972-??, 1998.
- 55
-
M. Prvulovic and J. Torrellas.
Reenact: using thread-level speculation mechanisms to debug data
races in multithreaded codes.
In Proceedings of the 30th Annual Symposium on Computer
Architecture, 2003.
- 56
-
M. Prvulovic and J. Torrellas.
ReEnact: Using Thread-Level Speculation to Debug Software; An
Application to Data Races in Multithreaded Codes.
In Proceedings of the 30th Annual International Symposium on
Computer Architecture (ISCA), June 2003.
- 57
-
R. Rodrigues, M. Castro, and B. Liskov.
BASE: Using abstraction to improve fault tolerance.
In Proceedings of the 18th ACM Symposium on Operating System
Principles, pages 15-28, Banff, Canada, Oct. 2001.
- 58
-
M. Ronsse and K. D. Bosschere.
RecPlay: a Fully Integrated Practical Record/Replay System.
ACM Transactions on Computer Systems, 17(2):133-152, 1999.
- 59
-
M. Russinovich and B. Cogswell.
Replay for concurrent non-deterministic shared-memory applications.
In Proceedings of the ACM SIGPLAN 1996 conference on Programming
language design and implementation, pages 258-266, Jerusalem, Israel, 1996.
ACM Press.
- 60
-
Y. Saito and B. Bershad.
A transactional memory service in an extensible operating system.
In USENIX Annual Technical Conference, 1998.
- 61
-
K. Salem and H. Garcia-Molina.
Checkpointing memory-resident databases.
Technical Report CS-TR-126-87, Department of Computer Science,
Princeton University, 1987.
- 62
-
M. Satyanarayanan, H. Mashburn, P. Kumar, D. Steere, and J. Kistler.
Lightweight recoverable virtual memory.
In SOSP, 1993.
- 63
-
S. Savage, M. Burrows, G. Nelson, P. Sobalvarro, and T. Anderson.
Eraser: A dynamic data race detector for multithreaded programs.
ACM Transactions on Computer Systems, 15(4):391-411, 1997.
- 64
-
E. Schonberg.
On-the-fly detection of access anomalies.
In ACM SIGPLAN '89 Conference on Programming Language Design and
Implementation (PLDI), June 1989.
- 65
-
M. Seltzer, Y. Endo, and C. Small.
Dealing with disaster: Surviving misbehaved kernel extensions.
In OSDI, 1996.
- 66
-
J. H. Slye and E. N. Elnozahy.
Supporting nondeterministic execution in fault-tolerant systems.
In Proceedings of the Twenty-Sixth International Symposium on
Fault-Tolerant Computing, pages 250-261, Washington, June25-27 1996.
IEEE.
- 67
-
S. W. Smith, D. B. Johnson, and J. D. Tygar.
Completely asynchronous optimistic recovery with minimal rollbacks.
In FTCS-25: 25th International Symposium on Fault Tolerant
Computing Digest of Papers, pages 361-371, Pasadena, California, 1995.
- 68
-
N. Sterling.
Warlock: A static data race analysis tool.
In USENIX Winter Technical Conference, 1993.
- 69
-
J. M. Stone.
Debugging concurrent processes: A case study.
In ACM SIGPLAN Conference on Programming Language Design and
Implementation (PLDI), June 1988.
- 70
-
R. E. Strom and S. A. Yemini.
Optimistic recovery in distributed systems.
ACM Transactions on Computer Systems, 3(3):204-226, Aug. 1985.
- 71
-
syscalltrack software home page at
https://syscalltrack.sourceforge.net/how.html.
- 72
-
C. A. Thekkath and H. M. Levy.
Hardware and software support for efficient exception handling.
In ASPLOS, 1994.
- 73
-
G. Trent and M. Sake.
Webstone: The first generation in http server benchmarking.
Feb 1995.
- 74
-
C. v. Praun and T. Gross.
Object race detection.
In 16th Annual Conference on Object-Oriented Programming,
Systems, Languages, and Applications (OOPSLA), Tampa Bay, FL, October 2001.
- 75
-
D. Wagner and D. Dean.
Intrusion detection via static analysis.
In IEEE Symposium on Security and Privacy, pages 156-169,
2001.
- 76
-
D. Wagner, J. Foster, E. Brewer, and A. Aiken.
A first step towards automated detection of buffer overrun
vulnerabilities.
In Network and Distributed System Security Symposium, pages
3-17, San Diego, CA, February 2000.
- 77
-
Y. Wang, P. Y. Chung, Y. Huang, and E. N. Elnozahy.
Integrating checkpointing with transaction processing.
In FTCS, 1997.
- 78
-
Y. Wang, Y. Huang, W. K. Fuchs, C. Kintala, and G. Suri.
Progressive retry for software failure recovery in message-passing
applications.
IEEE Transactions on Computers, 46(10):1137-1141, Oct 1997.
- 79
-
Y. Wang, Y. Huang, K.-P. Vo, P.-Y. Chung, and C. Kintala.
Checkpointing and its applications.
In FTCS-25, 1995.
- 80
-
M. Wu and W. Zwaenepoel.
eNVy: A non-volatile, main memory storage system.
In Proceedings of the Sixth International Conference on
Architectural Support for Programming Languages and Operating Systems, pages
86-97, San Jose, California, Oct. 4-7, 1994. ACM SIGARCH, SIGOPS, SIGPLAN,
and the IEEE Computer Society.
- 81
-
Y. Xie and D. Engler.
Using redundancies to find errors.
In Proceedings of the tenth ACM SIGSOFT symposium on Foundations
of software engineering, pages 51-60, 2002.
- 82
-
Y. Zhou, P. M. Chen, and K. Li.
Fast cluster failover using virtual memory-mapped communication.
In the 13th ACM International Conference on Supercomputing,
June 1999.
Flashback: A Lightweight Extension for Rollback and
Deterministic Replay for Software Debugging
This document was generated using the
LaTeX2HTML translator Version 2002 (1.62)
Copyright © 1993, 1994, 1995, 1996,
Nikos Drakos,
Computer Based Learning Unit, University of Leeds.
Copyright © 1997, 1998, 1999,
Ross Moore,
Mathematics Department, Macquarie University, Sydney.
The command line arguments were:
latex2html -split 0 -show_section_numbers -local_icons -white paper
The translation was initiated by on 2004-05-06
Footnotes
- ...
- This work
was supported in part by NSF under grants CCR-0325603, EIA-0072102, and
CHE-0121357; by DARPA under grant F30602-01-C-0078; by an IBM SUR grant;
and by additional gifts from IBM and Intel.
- ...
expired
- sleep on Linux is implemented using nanosleep which
swaps out the process after adding a timer onto the kernel's timer
list
2004-05-06
|
